драйверы серводвигателей
Когда говорят про сервоприводы, часто думают в первую очередь о самом двигателе или контроллере. А драйвер — эта ?промежуточная? штука — остается в тени, хотя именно он часто и определяет, будет ли система работать как часы или начнет ?чудить?. Многие, особенно на старте, считают, что взял драйвер с подходящими цифрами по току и напряжению — и порядок. На деле же, если копнуть, начинаются нюансы: управление током, алгоритмы компенсации, настройка контуров, да даже банальный выбор между аналоговым и цифровым интерфейсом. И каждый нюанс потом вылезает в реальной работе на станке или прессе.
От теории к практике: почему цифры в даташите — это только начало
Вот, допустим, смотришь спецификацию: номинальный ток, пиковый ток, ширина ШИМ. Вроде все сходится для твоего мотора. Ставишь, запускаешь. А он на низких оборотах греется, хотя нагрузка вроде небольшая. Или наоборот, при резком разгоне срабатывает защита. Оказывается, важно не только, какой ток драйвер может выдать, но и как он им управляет на разных скоростях, как работает система защиты от перегрузки. Некоторые драйверы серводвигателей слишком ?робкие? — при малейшем превышении момента тут же отключаются, парализуя всю линию. Другие, наоборот, слишком ?терпеливые?, что ведет к перегреву и выходу из строя. Идеал где-то посередине, и его настройка — это уже искусство.
Был у меня случай на одном из стендов для испытания гидроагрегатов. Использовали сервопривод для точного позиционирования заслонки. Драйвер был вроде неплохой, цифровой. Но при отладке контура положения постоянно возникала мелкая вибрация в точке останова. Долго искали причину в механике, в датчике обратной связи. В итоге оказалось, что в самом драйвере серводвигателя был слишком агрессивный фильтр по току, который вносил фазовый сдвиг в контур скорости, а он уже влиял на позиционный. Пришлось лезть в довольно глубокие параметры, менять коэффициенты фильтрации. Без понимания, как работает алгоритм внутри, решить такую проблему было бы почти невозможно.
Или еще момент — совместимость с обратной связью. Казалось бы, стандарты есть: энкодеры с sin/cos, с TTL, абсолютные, резольверы. Но на практике драйвер от одного производителя может некорректно интерпретировать сигнал энкодера другого, особенно если речь о высоких разрешениях или специфических протоколах. Потеря одного импульса на высоких оборотах — и вот уже позиция уплыла. Поэтому сейчас все чаще смотрю в сторону систем, где мотор, драйвер и обратная связь — это один слаженный комплект от проверенного вендора. Рисков меньше.
Гидравлика и сервопривод: где встречаются миры
Это отдельная большая тема. Многие думают, что сервопривод — это только для электромоторов. Но в высокомощных системах, особенно в тяжелом машиностроении, драйверы серводвигателей часто управляют серво-клапанами в гидравлических контурах. Тут задачи те же: точное позиционирование, контроль скорости и усилия, но среда и исполнительные механизмы совершенно другие.
Вот, к примеру, работаем мы с гидравлическими прессами или литьевыми машинами. Требуется не просто сдвинуть цилиндр, а сделать это по сложной траектории, с контролем давления в полостях. Здесь драйвер должен работать в тесной связке с контроллером, получая задание по положению, но при этом отслеживая аналоговые сигналы с датчиков давления. Ошибка в расчете управляющего сигнала для серво-клапана может привести либо к ?рывкам?, либо к вялому движению, а то и к перегреву масла из-за постоянной работы клапана в промежуточном положении.
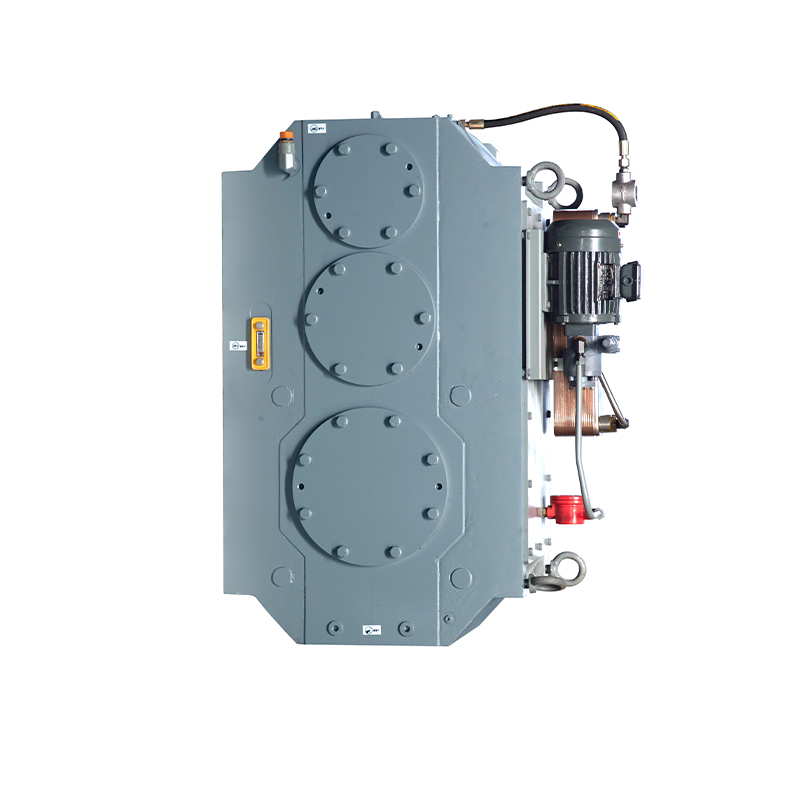
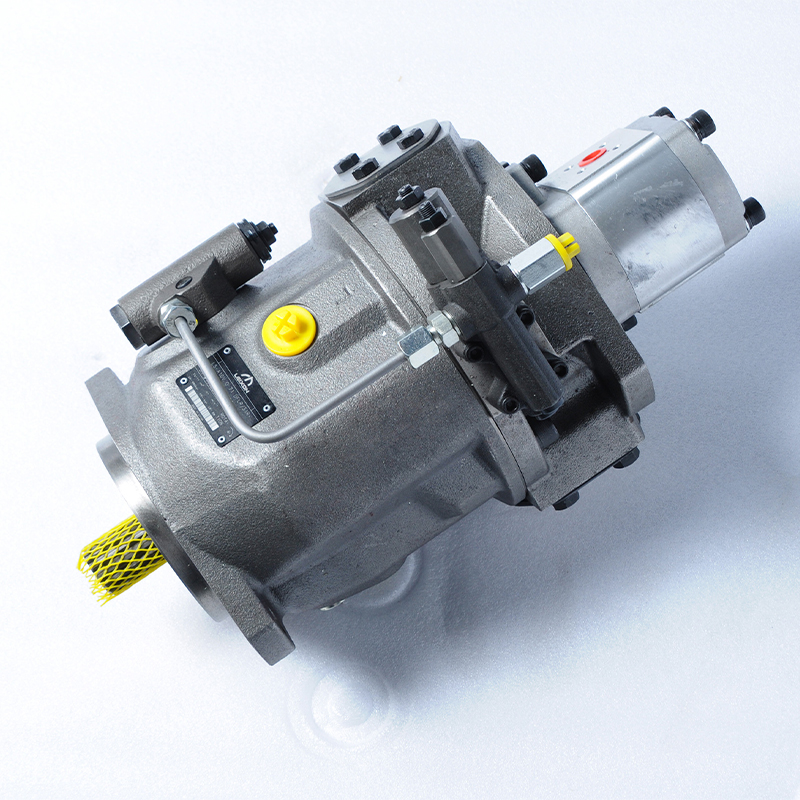
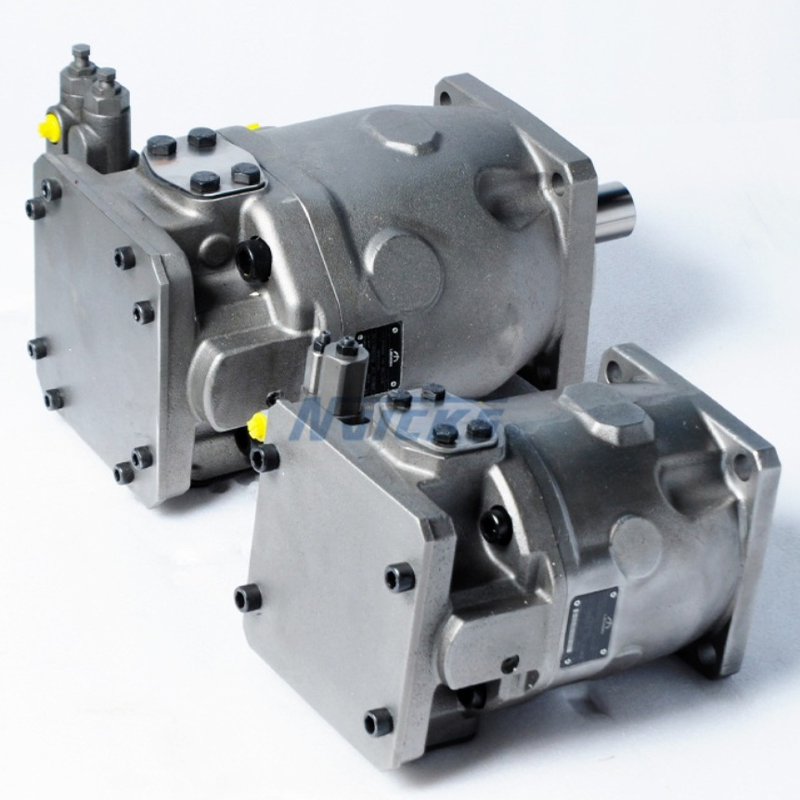
Тут как раз к месту вспомнить про компоненты, которые должны выдерживать такие режимы. Я часто сталкиваюсь с продукцией, которую поставляет, например, ООО Викс Интеллектуальное Оборудование (Нинбо). На их сайте vickshyd.ru можно увидеть, что они специализируются на ключевых гидрокомпонентах. Для сервогидравлики критически важны надежные насосы, способные быстро и точно реагировать на управление. Например, их пластинчатые насосы/моторы серий VQ или V10, которые позиционируются как инновационные ABT сервопластинчатые насосы. Или высококлассные плунжерные насосы серии A4VSO. Если драйвер серводвигателя выдает идеальный управляющий сигнал, но насосная группа имеет высокую инерционность или нелинейную характеристику, то о высокой динамике и точности можно забыть. Поэтому выбор драйвера часто идет в связке с анализом характеристик гидроагрегата.
Цифра против аналога: старый спор в новом свете
Раньше было четкое разделение: для простых задач — аналоговые драйверы (±10В), для сложных — цифровые, с полевыми шинами. Сейчас граница размыта. Цифровые стали дешевле и доступнее, но это не всегда панацея.
Аналоговый интерфейс, при всей своей простоте, дает минимальную задержку. Это бывает критично в контурах с очень высокой частотой обновления. Но зато он чувствителен к наводкам, требует качественной прокладки кабелей. Цифровой (EtherCAT, PROFINET, CANopen) избавляет от шумов, позволяет передавать кучу параметров и диагностики, но добавляет задержку на обработку пакетов. И если сеть перегружена, могут быть ?рывки? в работе.
Выбирая драйвер серводвигателя, теперь всегда смотрю на приложение. Если это синхронное движение нескольких осей по сложной траектории — однозначно цифра и быстрая шина. Если это одна ось с жесткими требованиями по быстродействию контура тока, иногда надежнее проверенный аналог. Был проект с высокоскоростной размоткой материала: попробовали поставить цифровой драйвер с EtherCAT, а контур тока не успевал — материал рвало. Вернулись на аналоговое управление с быстрым контроллером — все стало стабильно.
И еще про цифру: не все протоколы одинаково полезны. Некоторые производители делают свои ?упрощенные? цифровые интерфейсы, которые по сути являются тем же аналоговым сигналом, но оцифрованным. И толку от такой ?цифры? немного, кроме разве что удобства подключения витой парой.
Настройка и ?притирка? к системе: где кроется 80% успеха
Можно купить самый дорогой и навороченный драйвер, но если его неправильно настроить, работа будет никудышной. Автонастройка (tuning) есть сейчас почти везде, но она часто выдает лишь базовые, усредненные параметры. Для действительно точной и быстрой работы почти всегда нужна ручная доводка.
Начинаю обычно с контура тока. Это основа. Проверяю отклик на ступенчатое задание, смотрю осциллограммы. Важно, чтобы не было перерегулирования, но и отклик был быстрым. Потом перехожу к контуру скорости. Тут уже подключаю энкодер. И вот здесь часто вылезают механические резонансы конструкции. Драйвер должен иметь достаточно гибкие настройки фильтров (notch filter, low-pass), чтобы их подавить. Некоторые современные драйверы серводвигателей умеют автоматически сканировать резонансные частоты и настраивать фильтры, что очень экономит время.
И только потом настраиваю контур положения. И здесь важна не только точность позиционирования, но и поведение при подходе к точке. Должен ли привод ?въезжать? в позицию мягко или жестко? Зависит от задачи. Для пресса — один подход, для робота-манипулятора — другой. Часто забывают настроить параметры, отвечающие за поведение при нулевой скорости (stiffness), а потом удивляются, почему ось ?дрейфует? под нагрузкой.
Один из самых полезных, но редко используемых инструментов — это осциллограф или функция записи данных (data trace) внутри самого драйвера. Глядя на графики реального тока, заданной скорости и положения, можно понять то, что никогда не увидишь по кодам ошибок. Например, почему при определенном угле поворота вала возникает рывок — может, проблема в эксцентриситете или в настройке компенсации трения.
Неочевидные точки отказа и что с ними делать
Помимо очевидных вещей вроде перегрева или перегрузки, есть более коварные проблемы. Одна из них — наводки и помехи. Особенно в цехах с большим количеством силового оборудования. Импульсные помехи от частотников, сварочных аппаратов могут ?забивать? сигналы управления или обратной связи. Хороший драйвер серводвигателя должен иметь качественную гальваническую развязку и фильтрацию по входам. Но и монтажнику надо не забывать про экранированные кабели, правильное заземление (часто лучше на одну точку, а не ?куда попало?).
Другая проблема — питание. Нестабильное напряжение сети, провалы, гармоники. Многие драйверы чувствительны к качеству питания. Для критичных применений уже задумываешься об установке сетевых дросселей или даже активных корректоров коэффициента мощности (Active Front End), которые, кстати, сейчас все чаще встраивают в продвинутые модели драйверов. Они не только защищают сеть, но и позволяют рекуперировать энергию торможения обратно в сеть, что экономит деньги.
И, конечно, тепло. Драйвер — это не только силовые ключи, но и микропроцессор. Если он стоит в тесном шкафу с другой ?горячей? аппаратурой, даже при номинальном токе температура может подняться выше допустимой. Приходится рассчитывать вентиляцию, иногда ставить дополнительный теплоотвод. Помню, как на одном старом фрезерном станке драйверы постоянно уходили в ошибку по перегреву в летнюю смену. Решили банально — вынесли их из общего шкафа в отдельный, с собственной вытяжкой. Помогло.
Взгляд вперед: интеграция и умные функции
Сейчас тренд — это максимальная интеграция. Контроллер, драйвер, иногда даже силовая часть — все в одном корпусе. Это экономит место, упрощает монтаж и коммуникации. Для многих типовых станков (ЧПУ, упаковочные машины) это идеальный вариант. Но для мощных гидравлических систем, где нужна гибкость, часто предпочтительнее все же раздельное исполнение, чтобы можно было скомбинировать нужный контроллер с оптимальным по мощности драйвером и гидравлическим блоком, тем же насосом серии A10VSO или сервопластинчатым насосом от ООО Викс Интеллектуальное Оборудование (Нинбо).
Еще одна заметная тенденция — встроенные функции безопасности (Safety). Раньше для безопасного останова (Safe Torque Off) или ограничения скорости требовались внешние реле и модули. Теперь это все чаще вшито прямо в драйвер серводвигателя, что упрощает сертификацию оборудования и повышает надежность.
И, пожалуй, самое главное — диагностика. Современные драйверы стали настоящими ?информаторами?. Они не только показывают ошибку ?перегрузка?, но и могут записать осциллограммы параметров за несколько секунд до и после срабатывания защиты. Это бесценно для поиска периодических, плавающих неисправностей. Умение работать с этими данными, интерпретировать их — это уже следующий уровень квалификации для инженера.
В итоге, выбор и работа с драйверами — это не про чтение даташитов, а про понимание физики процесса, механики конкретной машины и тонкостей настройки. Это тот самый инструмент, который превращает набор железа и проводов в точную, надежную и предсказуемую систему. И чем сложнее задача, тем важнее эта ?коробочка? между контроллером и мотором.
Соответствующая продукция
Соответствующая продукция