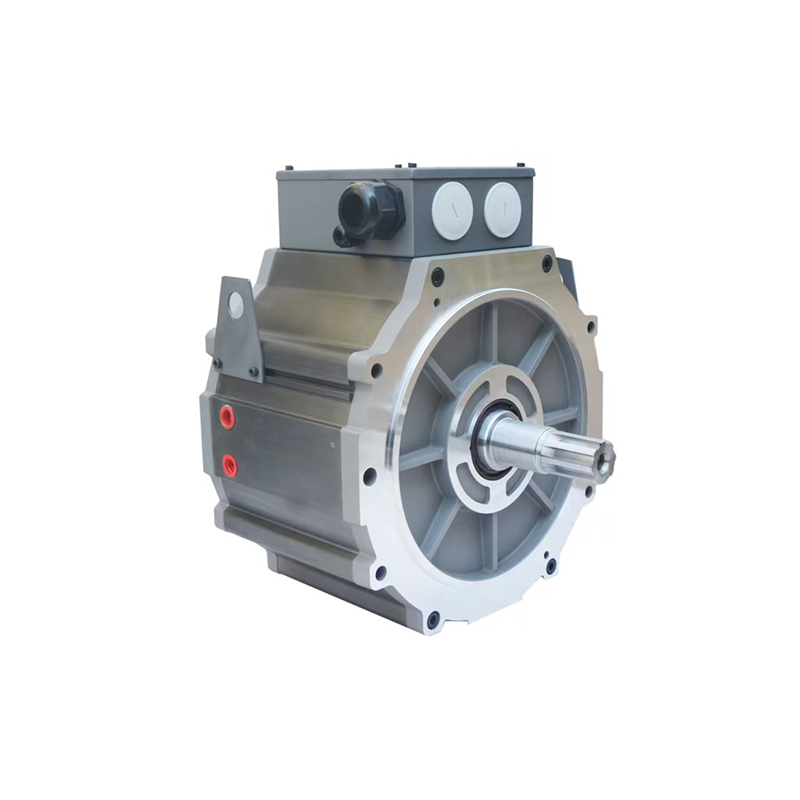
Контроллер серводвигателя переменного тока
Когда говорят про контроллер серводвигателя переменного тока, многие сразу представляют какую-то умную черную коробку, которая просто крутит мотор по заданным параметрам. На деле же — это нервный узел всей системы, и от его выбора и настройки зависит, будет ли оборудование работать как швейцарские часы или как телега с квадратными колесами. Частая ошибка — гнаться за максимальными цифрами в каталоге, не учитывая, как контроллер поведет себя в реальной связке с конкретной механикой и гидравликой. У нас, например, был случай с прессом, где из-за неверно подобранного режима работы контроллера по току возникали резонансные колебания в гидросистеме — вал мотора вроде крутится ровно, а давление в линии скачет. Пришлось разбираться не с насосом, а именно с настройками ШИМ и фильтрами обратной связи в контроллере.
Связка с гидравликой: где кроются подводные камни
Вот это, пожалуй, самый важный момент, который в теории часто упускают. Контроллер серводвигателя редко работает сам по себе. Он почти всегда приводит в действие насос. И если насос высоконапорный, с резкой характеристикой, как те же шестеренные насосы внутреннего зацепления серии VG, которые у нас в компании ООО Викс Интеллектуальное Оборудование (Нинбо) идут с давлением до 40 МПа, то требования к динамике контроллера совсем другие. Он должен не просто быстро разгонять двигатель, а делать это с таким ускорением, чтобы не создать гидроудар в момент старта. Иногда проще немного ?затупить? отклик по току, но выиграть в плавности хода поршня.
С пластинчатыми насосами, особенно с сервопластинчатыми серий T6/T7, история другая. Они сами по себе более ?послушные?, с хорошей управляемостью. Казалось бы, вот где можно выжать максимум из частотного преобразователя или специализированного сервоконтроллера. Но тут встает вопрос экономической целесообразности. Ставить ли дорогой полноценный сервоконтроллер с точной позицией, если система работает в основном на поддержание давления или расхода? Чаще всего нет. Достаточно качественного векторного частотника с точным управлением моментом. На сайте vickshyd.ru в разделе продукции это хорошо видно — спектр приводного оборудования огромен, и под каждый тип насоса нужен свой подход к управлению двигателем.
Помню, как раз для одного из наших пластинчатых моторов серии M4D пробовали использовать универсальный контроллер от известного бренда. В спецификациях все сходилось: и мощность, и интерфейсы. Но в работе постоянно срабатывала защита от перегрузки по моменту. Оказалось, алгоритм разгона контроллера был слишком агрессивным для инерционности нагрузки, которую создавал гидромотор в начале хода. Пришлось капаться в ПИД-регуляторах скорости и загружать кастомную кривую разгона. Без понимания, как ведет себя гидравлическая часть на старте, эту проблему не решить.
Ключевые параметры выбора: не только киловатты
Мощность и ток — это первое, на что смотрят. Но для контроллера серводвигателя переменного тока в гидроприводе не менее критична полоса пропускания контура управления током. Почему? Потому что многие современные насосы, те же плунжерные A4VSO, управляются пропорциональными электромагнитными клапанами с высокой частотой отклика. Если контроллер двигателя не успевает отрабатывать команды на изменение момента (фактически, давления), то вся система начинает ?плавать?. Получается рассогласование: контроллер насоса требует одно, а двигатель физически не может так быстро изменить обороты и момент.
Еще один нюанс — обратная связь. Энкодер, резольвер, синус-косинус... Для систем с позиционированием это обязательно. Но для насосных установок? Часто обходятся без датчика обратной связи на валу двигателя, используя векторное управление без обратной связи (Sensorless Vector). Это дешевле и надежнее. Однако, есть границы. При очень низких оборотах (меньше 1-2% от номинала) точность управления моментом падает. Если ваш технологический процесс подразумевает работу насоса в режиме медленного дозирования, то отказ от энкодера может стать ошибкой. У нас были претензии к работе насоса серии V10 в таком режиме с простым частотником — расход ?плыл?. После установки контроллера с обратной связью по энкодеру проблема ушла.
Нельзя забывать и про сетевые интерфейсы. Сейчас почти все ожидают наличия EtherCAT или PROFINET. Это правильно. Но на практике, на многих производствах еще жива и работает обычная Modbus RTU. И иногда проще и стабильнее завести контроллер по простому RS-485, чем городить сетевые шлюзы. Особенно если речь идет о модернизации старого станка. Проверяйте совместимость не на бумаге, а в железе. Однажды столкнулся с тем, что контроллер ?не видел? команды от ПЛК по Modbus, хотя драйвера были. Виной оказалась разная трактовка тайм-аутов в протоколе. Мелочь, а простой.
Настройка и адаптация: где заканчивается инструкция
Вот вы купили, казалось бы, идеальный контроллер. Распаковали, подключили. Автоподстройка (tuning) прошла успешно. А система работает нестабильно. Знакомая история? Дело в том, что стандартные алгоритмы автоподстройки рассчитаны на типовую механическую нагрузку — вентилятор, конвейер, насос с линейной характеристикой. Но гидравлика — штука нелинейная. Момент сопротивления на валу насоса зависит от давления, вязкости масла, температуры.
Поэтому после автоподстройки почти всегда требуется ручная доводка. Особенно контуров ПИД-регуляторов скорости и момента. Самый полезный инструмент здесь — осциллограф или функция записи параметров (datalogger) в самом контроллере. Нужно смотреть, как ведет себя задание и фактическая скорость при скачке давления. Если видите перерегулирование или медленный выход на уставку — корректируйте коэффициенты. Иногда помогает не стандартный ПИД, а ПИД с ограничением производной или feedforward (упреждением) по сигналу задания давления.
Особенно критична настройка для систем с насосами переменной производительности, как серии A10VSO. Там изменение рабочего объема — это дополнительная инерционность в контуре. Контроллер двигателя должен это компенсировать. Часто помогает введение виртуальной инерции в алгоритм управления или прямая связь по сигналу от датчика давления. Без этого двигатель будет постоянно входить в режим ограничения по току, пытаясь ?догнать? быстро меняющуюся нагрузку.
Практические кейсы и неудачи
Расскажу про один неудачный опыт, который многому научил. Задача была — сделать привод для испытательного стенда гидроагрегатов. Использовался высокомоментный серводвигатель и наш же плунжерный насос. Поставили топовый контроллер серводвигателя с широчайшими возможностями. Все настроили, вроде бы работает. Но при циклическом нагружении (резкий набор давления — сброс) двигатель начал перегреваться. Причем по токам все было в норме.
Долго ломали голову. Оказалось, проблема в алгоритме рекуперации энергии. При резком сбросе нагрузки насос превращался в гидромотор, двигатель — в генератор, а контроллер пытался вернуть энергию в сеть. Но из-за неидеальной формы сети и настроек торможения, эта энергия рассеивалась на самом контроллере и двигателе в виде тепла. Решение было неочевидным: отключили рекуперацию и поставили тормозной резистор, рассчитанный на пиковые режимы. Контроллер стал проще, дешевле, а система — надежнее. Вывод: не всегда нужно гнаться за ?умными? функциями. Иногда они создают проблемы, которых в конкретном применении можно избежать более простым путем.
Другой случай, уже успешный, связан с модернизацией старого пресса. Стоял асинхронный двигатель и простой байпасный клапан для регулирования давления. Клиент хотел экономии энергии. Установили энергоэффективный серводвигатель с контроллером и датчик давления. Настроили контур прямого управления моментом двигателя в зависимости от давления в системе. Теперь насос (пластинчатый V20) создает ровно столько давления, сколько нужно в данный момент, а не гоняет полный объем на клапан. Экономия энергии вышла под 40%. Ключевым был именно точный и быстрый отклик контроллера по току, который позволил напрямую связать момент двигателя и давление в гидролинии, минуя лишние клапаны.
Если смотреть на ассортимент компании ООО Викс Интеллектуальное Оборудование, то становится ясно, что универсального решения нет. Под высоконапорный шестеренный насос серии VG нужен один тип управления, под высокоточный сервопластинчатый насос ABT — другой, а для мощных аксиально-плунжерных насосов A4VSO — третий. И главная задача инженера — понять эту связку, этот симбиоз механики, гидравлики и электроники. Контроллер серводвигателя здесь — не главный герой, а важнейший член команды, от слаженности работы которого зависит общий результат.
Вместо заключения: мысль вслух
Сейчас много говорят про цифровизацию, Industry 4.0. И в этом контексте контроллер серводвигателя становится еще и источником данных: о потребленной энергии, температуре, времени работы на разных режимах. Это ценная информация для предиктивного обслуживания гидросистемы. Вибрация мотора, которую можно выявить через анализ токов, может сигнализировать о начинающемся износе подшипников насоса или о кавитации. Получается, что правильно выбранный и настроенный контроллер — это не только привод, но и система диагностики. Но чтобы это работало, нужно опять же глубоко понимать процессы. Недостаточно просто считать данные, нужно уметь их интерпретировать в контексте работы конкретного гидравлического компонента — будь то насос, мотор или целый гидроагрегат. Работа, в общем, никогда не заканчивается. Поставил, настроил — и начинается самое интересное: наблюдение, анализ, тонкая подстройка. В этом, наверное, и есть главный интерес.
Соответствующая продукция
Соответствующая продукция