

Контроллер сервопривода
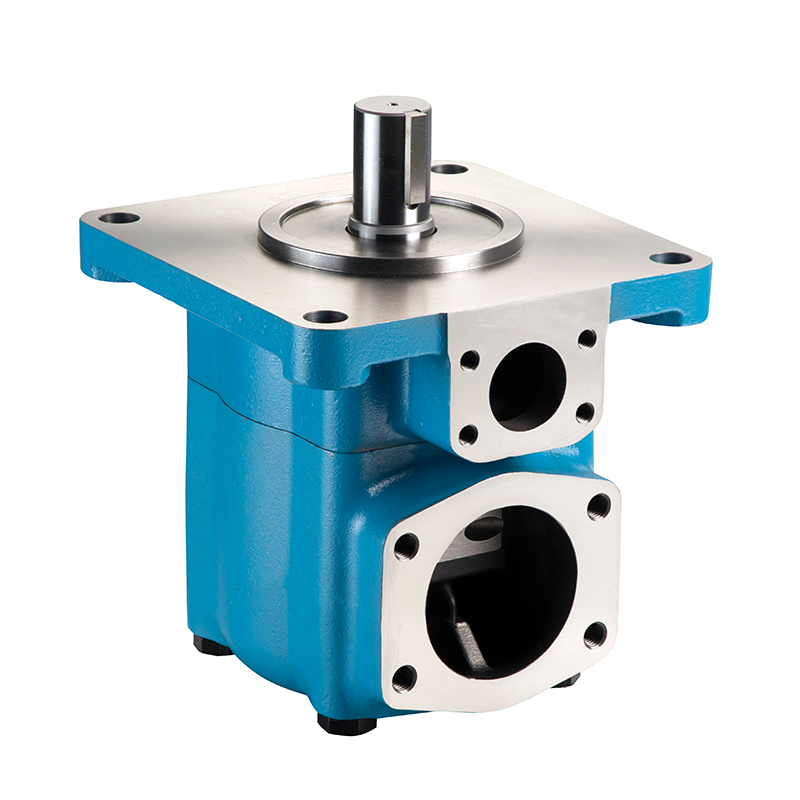
Когда говорят про контроллер сервопривода, многие сразу представляют себе какую-то коробочку с разъемами, которая по протоколу принимает задание и выдает ток на мотор. На деле же — это самый мозг системы, и от его адекватности зависит, будет ли вся механика работать как швейцарские часы или начнет дергаться, греть масло и в итоге развалится. Частая ошибка — считать, что главное в сервоприводе это сам двигатель или насос, а контроллер можно взять любой, ?лишь бы подходил по напряжению?. Работая с гидравликой, особенно с прецизионными системами, я не раз убеждался, что это в корне неверно. Вот, например, когда мы настраивали линию с пластинчатыми насосами серии VQ от Vicks, то изначально попробовали поставить универсальный промышленный контроллер. Вроде все по мануалу: подключили энкодер, выставили ПИД-регуляторы. Но при работе с переменной нагрузкой начались проблемы — привод то перегревался, то на резких стартах появлялась вибрация. Пришлось копать глубже.
Что на самом деле скрывается за термином
По своему опыту, контроллер сервопривода — это не отдельное устройство, а целый комплекс решений. В него входит и силовая часть, которая коммутирует ток, и блок управления с процессором, и программное обеспечение, которое часто оказывается самым слабым звеном. Особенно это касается гидравлических систем, где нужно учитывать не только электрические параметры, но и гидродинамику — инерцию масла, сжимаемость, реакцию плунжерных насосов. Если контроллер не умеет компенсировать эти эффекты, о высокой динамике и точности можно забыть.
Вот конкретный случай из практики. Был у нас проект с высоконапорным шестеренным насосом серии VG (как раз те, что у Vicks, с давлением до 40 МПа). Задача — точное позиционирование тяжелого штока. Поставили стандартный цифровой контроллер от известного бренда. На холостом ходу все работало идеально, но как только добавлялась нагрузка, система начинала ?плавать?. Оказалось, что алгоритм регулятора не учитывал нелинейность подачи масла насосом на высоких оборотах. Контроллер видел рассогласование по энкодеру и давал больше тока, но из-за запаздывания в гидросистеме он постоянно перерегулировал. Решение было не в замене насоса (который, кстати, показал себя отлично), а в подборе контроллера, который позволял гибко настраивать фильтры и предсказывать поведение гидравлической части.
Отсюда вывод, который для многих в отрасли стал очевиден лишь со временем: выбор контроллера сервопривода нужно начинать не с электрических характеристик, а с понимания технологического процесса и механической части, которой он управляет. Особенно это критично для компонентов от ООО Викс Интеллектуальное Оборудование (Нинбо), которые часто используются в сложных условиях. Их сервопластинчатые насосы ABT, например, имеют очень высокую динамику отклика, и примитивный контроллер просто не раскроет их потенциал, а может даже стать причиной поломки.
Связка с гидравлическими компонентами: тонкости настройки
Работая с сайтом vickshyd.ru, видишь, что спектр компонентов огромен: от насосов до полного спектра гидромоторов. И для каждого типа агрегата подход к управлению может отличаться. Скажем, для точного контроля скорости вращения вала гидравлического мотора серии NHM нужен один тип обратной связи и алгоритмов, а для управления давлением в системе с плунжерным насосом A4VSO — совершенно другой.
Одна из самых сложных задач, с которой мы столкнулись — это интеграция контроллера в систему с несколькими насосами. Была линия, где использовался основной пластинчатый насос серии T7 для постоянного потока и дополнительный шестеренный насос VG для пиковых нагрузок. Контроллер должен был не просто управлять каждым по отдельности, а синхронизировать их работу, переключая и плавно изменяя суммарную подачу. Стандартные решения часто предлагали простое включение/выключение второго насоса, что приводило к скачкам давления. Пришлось искать контроллер, который поддерживал сложные логические условия и мог работать с аналоговыми сигналами датчиков давления напрямую, без промежуточных ПЛК.
Здесь важно отметить, что многие современные контроллеры сервоприводов позиционируются как ?универсальные?, но их универсальность часто ограничена электрическими приводами. В гидравлике же ключевым параметром может быть, например, время отклика клапана или коэффициент сжимаемости масла при данной температуре. Эти параметры редко можно задать в стандартном интерфейсе. Поэтому сейчас мы часто смотрим в сторону специализированных решений или тех платформ, где можно реализовать собственную математическую модель управления, заложив в нее особенности конкретных компонентов Vicks, будь то моторы серии M4E или насосы PV2R.
Программная часть: где кроются главные проблемы
Если ?железо? контроллера сегодня более-менее стандартизировано, то с софтом — полный разброд. Производители самих приводов часто поставляют свое ПО для настройки, но оно может быть крайне неудобным или ограниченным. Помню, как потратил два дня, чтобы настроить плавный разгон для сервопластинчатого насоса ABT через родной софт от одного контроллера. Все нужные параметры вроде бы были, но интерфейс был настолько запутанным, что легко было ошибиться.
Другая частая головная боль — совместимость протоколов. Оборудование Vicks может поставляться с разными интерфейсами обратной связи, а контроллер должен их понимать. Бывало, что купленный ?совместимый с энкодерами Resolver? контроллер на деле имел проблемы с фильтрацией сигнала на длинных кабелях, что приводило к шумам и потере точности. Приходилось добавлять внешние преобразователи, что усложняло систему и вносило дополнительные точки отказа.
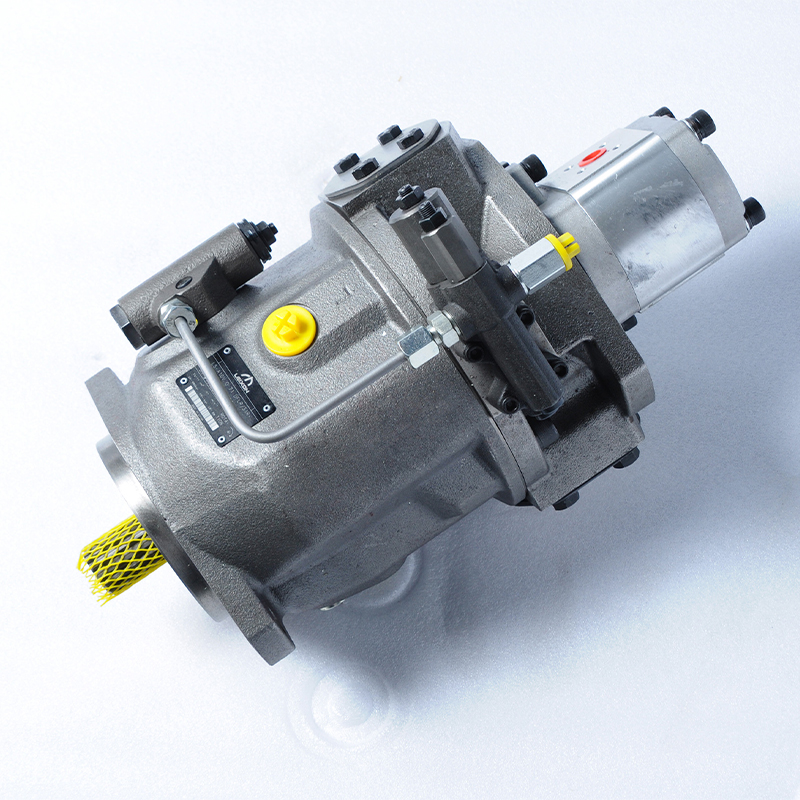
Сейчас, кажется, тренд смещается в сторону открытых систем. Хорошо, когда контроллер сервопривода позволяет не только настроить базовые ПИД-регуляторы, но и запрограммировать логику работы, связанную с внешними событиями от датчиков или главного компьютера линии. Это особенно важно для комплексных систем, которые собираются из компонентов разных производителей. Например, когда плунжерный насос A10VSO от Vicks работает в паре с клапанной группой другого бренда, контроллер должен стать тем звеном, которое обеспечит их слаженную работу, а не просто будет выполнять команды ?включить/выключить?.
Практические кейсы и уроки из неудач
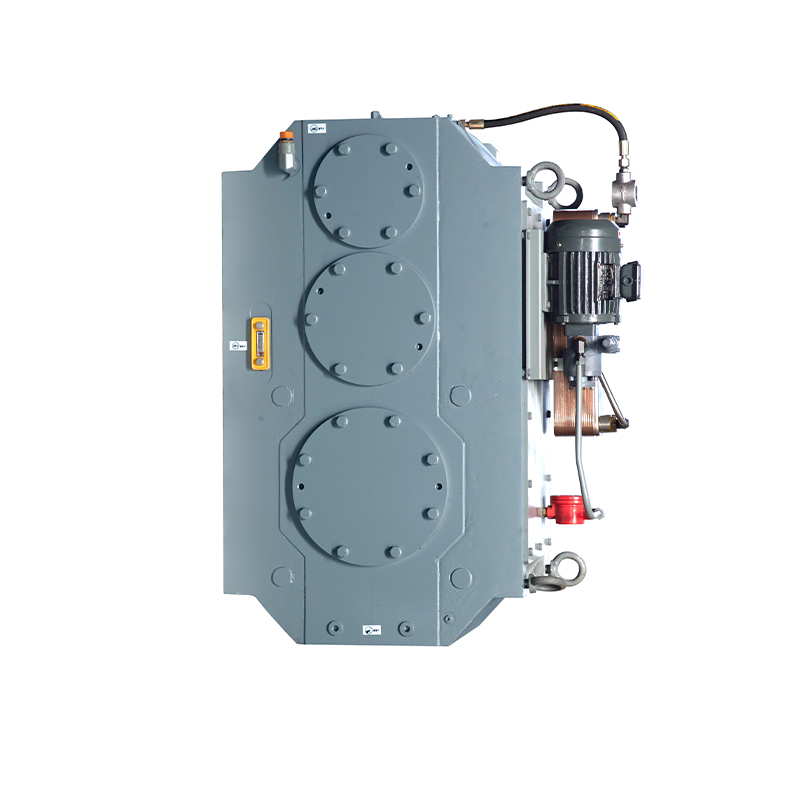
Расскажу про один проект, который стал для нас хорошим уроком. Задача была в создании испытательного стенда для гидроцилиндров. В основе — пластинчатый насос серии SQP как источник стабильного потока. Нужно было точно регулировать давление и скорость перемещения штока. Выбрали, как тогда казалось, продвинутый цифровой контроллер с сенсорным экраном. Начали испытания — и сразу проблема: при плавном увеличении нагрузки контроллер уходил в колебания. Давление скакало, хотя насос был исправен.
Долго искали причину. Проверили датчики, трубопроводы — все в порядке. Вскрыли настройки контроллера. Оказалось, что по умолчанию в нем был включен очень агрессивный алгоритм адаптации параметров ПИД-регулятора ?на лету?. Для электрических двигателей это, может, и хорошо, но в гидравлической системе с ее инерционностью это привело к постоянной перестройке коэффициентов и неустойчивости. Отключили эту функцию, вручную подобрали коэффициенты, учитывая известную нам динамику насоса SQP — и система заработала как часы. Вывод: даже самые ?умные? функции контроллера могут быть вредны, если не понимаешь их применимость к конкретной физике процесса.
Еще один момент, который часто упускают из виду — это условия эксплуатации. Контроллер, стоящий в шкафу рядом с гидробаком, подвергается вибрациям и перепадам температур. Мы как-то получили партию отказных плат управления. Анализ показал, что от вибрации отпаивались мелкие SMD-компоненты. Производитель контроллеров тестировал их на электромеханические вибрации, но не учел специфику низкочастотных вибраций от работающего гидравлического мотора GHM. Пришлось дорабатывать крепление и добавлять демпфирующие прокладки. Теперь при выборе всегда смотрим не только на электрические характеристики, но и на исполнение корпуса, качество пайки и заявленную стойкость к вибрациям.
Взгляд в будущее и текущие тренды
Сейчас все чаще говорят о внедрении промышленного интернета вещей (IIoT) и предиктивной аналитики в гидроприводы. И здесь роль контроллера сервопривода становится еще более центральной. Он должен не только управлять, но и собирать данные: токи, температуры, вибрации, параметры от датчиков давления в системе. Если в системе стоит, допустим, мотор серии EPMZ от Vicks, то контроллер, отслеживая малейшие изменения в потребляемом токе и сопоставляя их с давлением, может предсказать износ уплотнений или засорение фильтра.
Но для этого сам контроллер должен быть достаточно мощным и иметь соответствующие интерфейсы связи. Пока что многие системы работают по старинке: контроллер выполняет свою основную задачу, а диагностика сводится к аварийным датчикам. Думаю, в ближайшие годы мы увидим более тесную интеграцию между производителями гидравлических компонентов, таких как ООО Викс, и разработчиками систем управления. Может быть, появятся готовые профили настройки контроллеров под конкретные серии насосов и моторов, что значительно упростит жизнь инженерам-наладчикам.
В итоге, возвращаясь к началу. Контроллер сервопривода — это не просто комплектующее. Это решение, которое требует глубокого понимания и механики, и гидравлики, и электроники. Экономия на нем или невнимательный выбор часто оборачиваются многократными потерями на простое, ремонте и невыполнении техзаданий. Работая с надежными и динамичными компонентами, как у Vicks, имеет смысл подбирать управление того же уровня — гибкое, настраиваемое и, что важно, понятное для того, кто будет его обслуживать в цеху. Потому что самая совершенная плата бесполезна, если для изменения коэффициента усиления нужно вызывать программиста из другого города.
Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты





Связанный поиск
Связанный поиск- гидравлические насосы спб
- лучшие серводвигатели
- Редуктор с высоким крутящим моментом
- Вертикальная гидравлическая литьевая машина
- крупногабаритный серводвигатель
- Шестеренный насос внутреннего зацепления
- производства гидравлических насосов
- Машина для литья под давлением
- Вертикальная литьевая машина
- сервопривод переменного тока



