Промышленное управление движением
Когда слышишь ?промышленное управление движением?, многие сразу думают о программируемых контроллерах, шинах данных типа EtherCAT или Profinet, и софте для траекторного планирования. Это, конечно, основа, но если копнуть глубже в реальный проект, особенно там, где есть серьёзные силовые нагрузки — прессы, испытательные стенды, тяжёлые манипуляторы — понимаешь, что ключевое звено часто лежит в другом. В том, как преобразовать электрический сигнал управления в точное, надёжное и повторяемое физическое движение под переменной нагрузкой. И вот здесь всё упирается в гидравлику или сервоприводы, а точнее — в их силовую часть. Без качественных, предсказуемых по поведению гидравлических компонентов все алгоритмы управления — просто красивые формулы на экране. У нас в отрасли частенько грешат тем, что уделяют 80% внимания системе управления и 20% — исполнительным механизмам, а потом удивляются, почему позиционирование ?плывёт? или отклик на резкое изменение задания такой вялый.
От теории к практике: где кроются реальные сложности
Взять, к примеру, задачу точного позиционирования тяжелой плиты на гидравлическом прессе. Контроллер выдал команду, сервоклапан отработал. Но дальше всё зависит от насоса. Если он не обеспечивает стабильный, пульсации минимальный поток под меняющимся давлением, то поршень будет двигаться рывками, несмотря на все старания ПИД-регулятора контура давления или положения. Особенно критично это на низких скоростях или при удержании позиции. Много раз видел, как инженеры неделями ?танцуют с бубном? вокруг настроек контроллера, а проблема решается заменой насоса на модель с лучшими динамическими характеристиками.
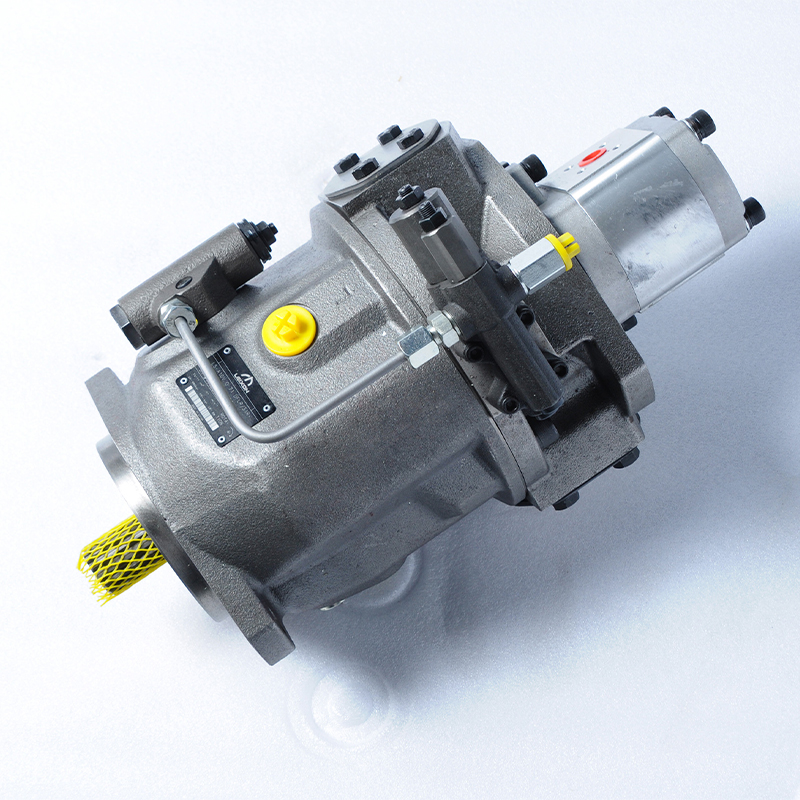
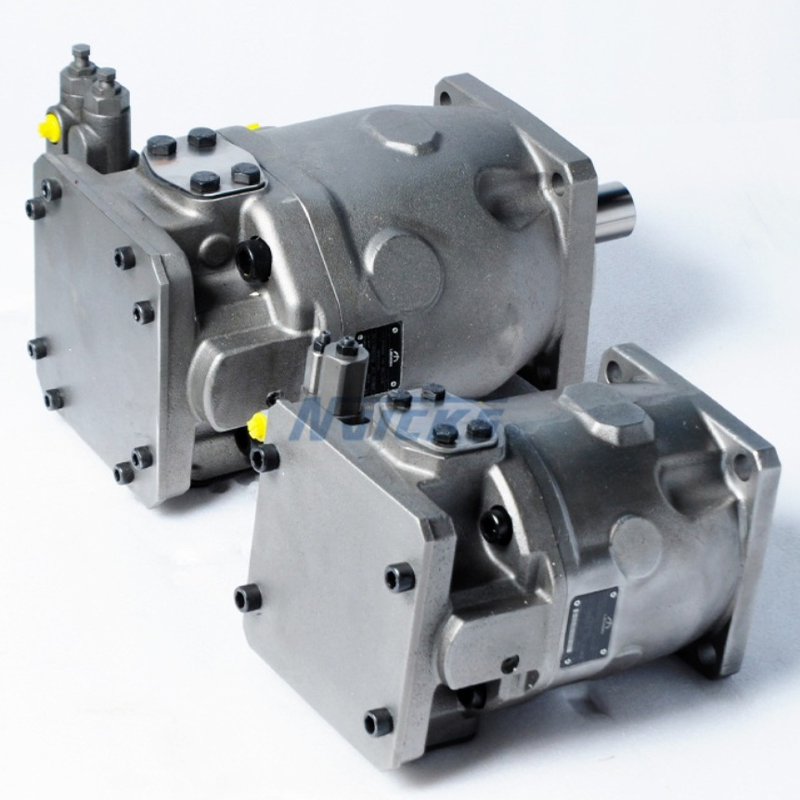
Здесь как раз и выходит на первый план выбор компонентов. Нельзя просто взять ?какой-то? шестеренный или поршневой насос. Нужно смотреть на его динамический отклик, на способность быстро менять рабочий объем (если речь о регулируемых насосах), на внутреннюю демпфирующую способность. Например, для задач промышленного управления движением с высокими требованиями к точности часто рассматривают аксиально-поршневые регулируемые насосы. Но и среди них есть нюансы. Одно дело — стандартные серии для мобильной техники, другое — модели, заточенные именно под станочные применения или испытательные системы, где важна не только мощность, но и ?чистота? управления потоком.
В контексте этого хочется отметить подход некоторых поставщиков, которые фокусируются именно на таких, требовательных к управлению, сегментах. Вот, к примеру, на сайте ООО ?Викс Интеллектуальное Оборудование (Нинбо)? (https://www.vickshyd.ru) видно, что они не просто торгуют гидравликой, а структурируют предложение под задачи. Видно разделение: вот высоконапорные шестеренные насосы серии VG для контуров, где нужна надежность и постоянная подача, а вот — целый спектр пластинчатых насосов и моторов, включая инновационные ABT сервопластинчатые насосы. Последние, судя по описанию, как раз и могут быть интересны для систем с обратной связью по положению или давлению, так как сервоуправление подразумевает высокую динамику. И отдельно вынесены плунжерные насосы высокого класса, те же A4VSO/A10VSO — классика для сложных систем управления с электронным пропорциональным регулированием. Такая детализация уже намекает на понимание, что для разных задач промышленного управления движением нужна разная ?начинка?.
Кейс: неудача, которая научила больше, чем успех
Расскажу про один наш проект, лет пять назад. Разрабатывали стенд для циклических испытаний на усталость. Техзадание: точное воспроизведение синусоидальной нагрузки с частотой до 5 Гц и амплитудой в десятки тонн. Исполнительный механизм — гидроцилиндр. Всю систему управления сделали на базе продвинутого ПЛК с модулями высокоскоростного АЦП/ЦАП и сервоконтроллером. Казалось, что гидравлическая часть — дело техники: взяли мощный регулируемый поршневой насос, сервораспределитель, собрали.
И начались проблемы. На частотах выше 2 Гц синусоида нагрузки начинала ?заваливаться?, появлялись гармоники, система входила в резонанс. Долго искали причину в программном обеспечении, в датчиках. Оказалось, всё проще и сложнее одновременно. Насос, который мы выбрали, имел слишком большую инерционность механизма регулирования рабочего объема. Он просто не успевал за быстрыми изменениями задания от контроллера. Фактически, он вносил фазовое запаздывание в контур управления, что и приводило к неустойчивости на повышенных частотах.
Пришлось пересматривать силовую часть. Упор сделали на быстродействующий сервораспределитель и, что ключевое, на насос с минимальным временем отклика. Рассматривали в том числе и сервопластинчатые модели, как раз из-за их потенциально более высокой динамики по сравнению с некоторыми поршневыми. В итоге, подобрав другой тип насоса и перенастроив контуры управления с учётом новых динамических характеристик всей гидросистемы, добились нужных параметров. Этот опыт чётко показал, что проектирование системы промышленного управления движением — это всегда компромисс и учёт динамики ВСЕХ звеньев цепи, от бита в контроллере до штока гидроцилиндра.
Интеграция компонентов: когда спецификации — не догма
Ещё один важный момент, который редко обсуждают в учебниках, — это взаимное влияние компонентов в одном контуре. Допустим, вы берёте насос от одного производителя, мотор от другого, а сервоклапан от третьего. Да, по давлению, потоку и размерам они стыкуются. Но вот их частотные характеристики, коэффициенты демпфирования, даже материалы уплотнений (влияющие на трение и гистерезис) могут быть разными. В итоге система в сборе ведёт себя не так, как предсказывала симуляция, построенная на идеализированных данных из каталогов.
Поэтому сейчас всё чаще стремятся к использованию комплексных решений или компонентов, хорошо известных по совместной работе. Это не реклама, а констатация факта: когда один поставщик, типа упомянутого vickshyd.ru, предлагает не просто насосы, а и полный спектр гидромоторов (NHM, FMB, GHM и т.д.), и распределительную аппаратуру, есть шанс, что эти компоненты лучше ?притёрты? друг к другу. Хотя бы потому, что инженеры этой компании, подбирая ассортимент, наверняка учитывают совместимость. Для интегратора это снижает риски на этапе пусконаладки.
Особенно это касается моторов для привода вращательного движения. Точность позиционирования поворотной платформы или конвейера зависит не только от сервоусилителя и энкодера, но и от того, насколько плавно и предсказуемо ведёт себя гидромотор на низких оборотах, каков у него момент трогания. Упоминание в описании компании таких серий как M3B/M4C/M4D/M4E для пластинчатых моторов наводит на мысль, что там есть варианты именно для управляемых приводов, а не просто для задач непрерывного вращения.
Будущее: цифра, но на прочном гидравлическом фундаменте
Сейчас много говорят про Индустрию 4.0, цифровых двойников, предиктивную аналитику. И это неизбежно приходит и в промышленное управление движением. Но важно понимать: цифровой двойник гидравлического пресса будет точным и полезным только в том случае, если в его модель заложены реальные, а не идеальные параметры насосов, клапанов, цилиндров. Тот же цифровой двойник может помочь подобрать компоненты на этапе проектирования, смоделировать отклик системы с насосом серии VQ против насоса серии PV2R, например.
Поэтому роль поставщиков компонентов эволюционирует. От них ждут не просто каталога с размерами, а детальных цифровых моделей (FMU, например), данных о характеристиках в машиночитаемом виде. Чтобы можно было импортировать параметры реального насоса A10VSO в среду моделирования и увидеть, как он повлияет на быстродействие всего контура управления. Это следующий уровень.
Возвращаясь к началу. Управление движением — это система. И надёжность, точность и быстродействие этой системы определяются самым слабым звеном. Часто этим звеном оказывается не алгоритм, а физика работы силового привода. И выбор компонентов для этой части — такой же важный и ответственный этап проектирования, как и выбор контроллера или сетевого протокола. Нужно смотреть на динамику, на совместимость, на наличие проверенных решений для конкретных задач — будь то прецизионное позиционирование или воспроизведение сложного силового профиля. Именно такой, целостный, подход и позволяет создавать по-настоящему эффективные и надёжные системы.
Соответствующая продукция
Соответствующая продукция