

Промышленный контроллер
Когда говорят ?промышленный контроллер?, многие сразу представляют себе шкаф с мигающими лампочками где-нибудь на старом заводе — этакий монолит, который ?просто управляет?. На деле же, это нервный узел, от выбора и настройки которого зависит, будет ли вся система работать как швейцарские часы или превратится в головную боль на годы вперед. Слишком часто на него смотрят как на расходник, а не как на ключевой компонент, требующий понимания физики процесса, который он должен вести.
От железа к логике: что на самом деле важно
Взял я как-то проект по модернизации гидравлического пресса. Заказчик купил ?мощный? промышленный контроллер именитого бренда, а система всё равно работала рывками, с перегрузками. Стал разбираться. Оказалось, что все внимание ушло на мегагерцы и объем памяти, а вот цикл опроса датчиков давления и обратная связь по положению гидроцилиндров были настроены кое-как. Контроллер-то был мощный, но его программа не учитывала инерцию и гидравлические удары. Пришлось переписывать логику, завязанную не на сухие дискретные сигналы, а на аналоговые значения с фильтрацией и упреждением. Вот тут и понимаешь, что главное — не железо, а инженер, который понимает, как работает привод и что ему нужно от ?мозга?.
Кстати, о железе. Частая ошибка — пытаться сэкономить на вводе-выводе, особенно аналоговом и быстром. Ставили мы как-то контроллер для управления сервоприводом насоса. Сигнал задания шел по стандартному аналоговому входу 0-10В, а нужна была точность и скорость отклика. Шум, дрейф нуля — и точность позиционирования упала. Пришлось ставить специализированный модуль с более высоким разрешением и защитой. Вывод: тип и качество интерфейсов контроллера должны быть адекватны датчикам и исполнительным механизмам. Нельзя управлять прецизионным гидравлическим контуром с помощью входов ?для кнопок и лампочек?.
И еще один момент, который часто упускают из виду — среда. Контроллер может быть установлен в цеху рядом с гидростанцией. Вибрация, температура, масляная пыль — всё это убивает негерметизированные блоки за пару лет. Видел ?убитые? клеммники, залитые маслом, и отказавшие из-за перегрева процессорные модули. Поэтому сейчас всегда смотрю на степень защиты, рабочий температурный диапазон и качество разъемов. Иногда лучше взять чуть менее ?навороченную?, но более живучую модель.
Гидравлика и ?мозги?: поиск точки сопряжения
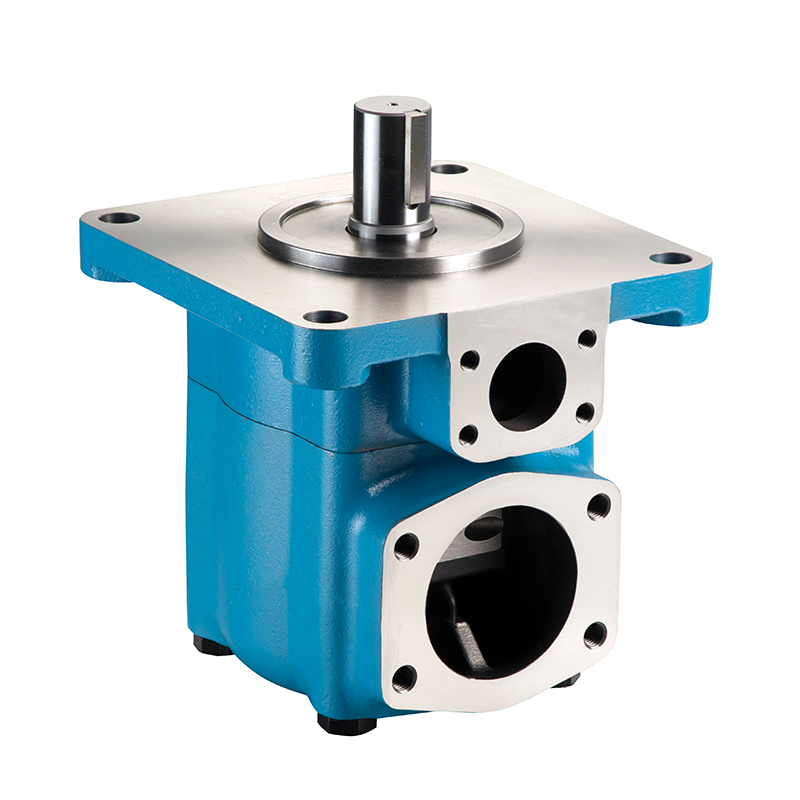
Здесь хочется сделать отступление и поговорить про компонентную базу. Без понимания того, чем ты управляешь, даже лучший контроллер бесполезен. Возьмем, к примеру, высоконапорные шестеренные насосы. Допустим, серия VG, которая работает на 40 МПа. Если контроллер будет резко давать команду на изменение скорости или давления, можно получить не только перегрузку по току на электроприводе, но и опасные гидроудары в системе. Логика контроллера должна включать плавные рампы разгона/торможения и, желательно, адаптацию под изменение вязкости масла — а это уже дополнительные датчики и алгоритмы.
Или другой случай — работа с инновационными ABT сервопластинчатыми насосами. Их преимущество — высокий КПД и точное управление расходом. Но чтобы раскрыть этот потенциал, контроллер должен обеспечивать не просто включение/выключение, а точное аналоговое или цифровое задание. Причем сигнал должен быть стабильным, без шумов. Мы интегрировали такие насосы в систему испытательного стенда, и ключевым стал выбор контроллера с высокоскоростными аналоговыми выходами и возможностью программной компенсации нелинейностей характеристики насоса. Без этого точность поддержания давления ?плыла?.
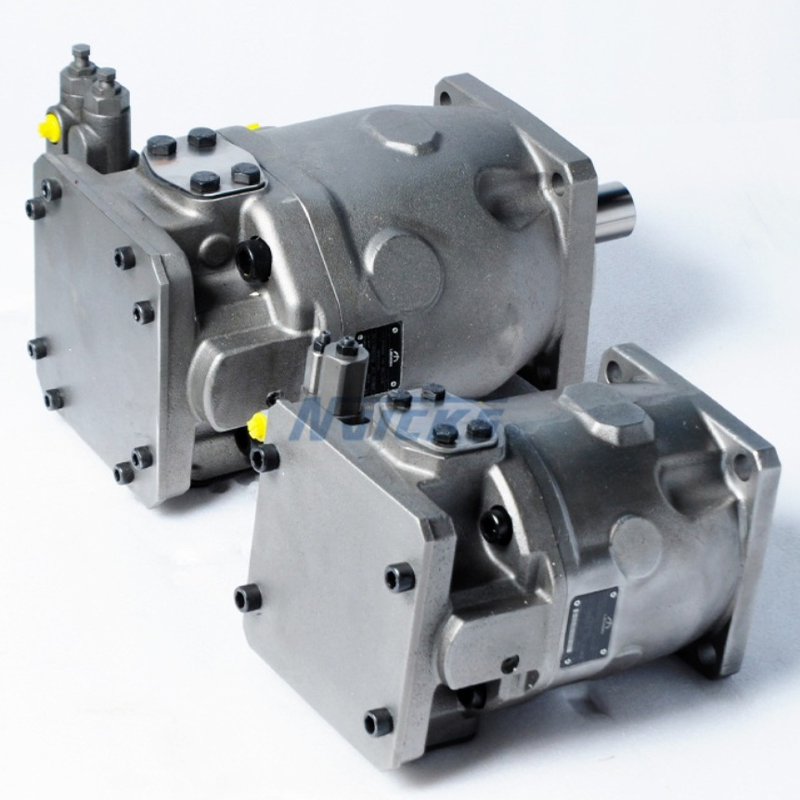
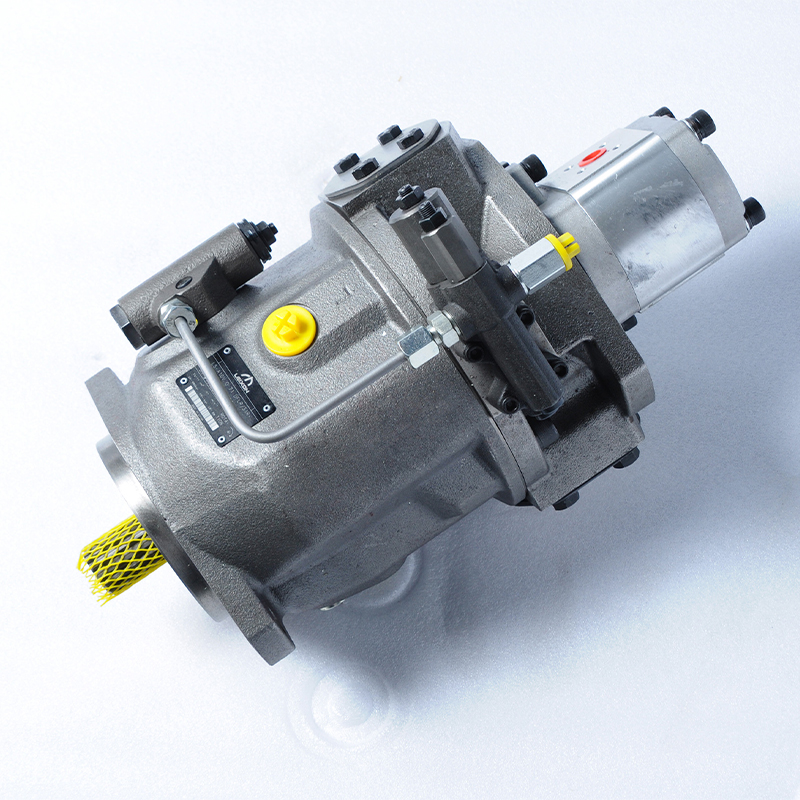
Тут уместно вспомнить про компанию ООО ?Викс Интеллектуальное Оборудование (Нинбо)?. На их сайте vickshyd.ru виден серьезный подход к гидравлике. Они предлагают не просто насосы, а, по сути, готовые высокотехнологичные модули — те же шестеренные насосы серии VG или целый спектр пластинчатых насосов и моторов серий T6, T7, V и других. Когда имеешь дело с таким оборудованием, понимаешь, что промышленный контроллер для него должен быть соответствующего класса. Попытка управлять прецизионным насосом A4VSO через примитивный релейный регулятор — это выброшенные на ветер деньги за оборудование и потеря всех его преимуществ.
Провалы и находки: из личного опыта
Был у меня один неприятный опыт. Делали систему с несколькими гидравлическими контурами, каждый со своим насосом и золотниковой аппаратурой. В целях экономии поставили один промышленный контроллер средней мощности на всё. В теории — все задачи решаемы, циклограммы составлены. На практике — при одновременной работе нескольких контуров контроллер не успевал обрабатывать прерывания от датчиков, возникали задержки. Это привело к рассинхронизации процессов и, в одном случае, к порче оснастки. Пришлось срочно переделывать архитектуру, ставить дополнительный контроллер, организовывать обмен между ними. Урок дорогой: всегда нужно считать не только объем логики, но и время отклика в наихудшем сценарии (worst-case scenario).
А вот удачный пример. Модернизировали старый ковочный молот. Гидравлика была на базе надежных, но ?тугих? на управление плунжерных насосов. Задача — сделать плавное и точное регулирование силы удара. Взяли за основу контроллер с возможностью работы в реальном времени и добавили к нему пропорциональные гидрораспределители с обратной связью. Ключевым стало написание алгоритма, который не просто открывал/закрывал клапан по таймеру, а в реальном времени корректировал сигнал на основе обратной связи по давлению и положению. После отладки система заработала идеально, а точность контроля силы возросла на порядок. Это тот случай, когда контроллер раскрыл возможности гидравлики.
Еще один момент, который стал для меня открытием — важность средств диагностики и калибровки. В хорошем контроллере должна быть возможность не только писать логи, но и в реальном времени снимать осциллограммы ключевых сигналов (давление, положение), желательно прямо с панели оператора. Это бесценно при пусконаладке и поиске глюков. Сколько раз это спасало, когда на графике давления вдруг была видна маленькая ?игла? — признак подклинивающего клапана, который в логах по дискретным событиям было не поймать.
Будущее: интеграция и ?умная? гидравлика
Сейчас всё чаще говорят про Индустрию 4.0 и IIoT. И здесь роль промышленного контроллера меняется. Он уже не изолированный ?черный ящик?. Он должен уметь общаться по OPC UA, Modbus TCP, иметь защищенные каналы для удаленного доступа (с огромной оговоркой на безопасность!). В контексте гидравлики это открывает фантастические возможности. Представьте: насосная станция с пластинчатыми моторами серий M4D или M4E передает данные о рабочем объеме, давлении, температуре масла и вибрации не только на локальный SCADA-щит, но и в облако. Контроллер, анализируя эти тренды, может предсказать износ уплотнений или кавитацию и запросить техобслуживание до поломки.
Но здесь же кроется и ловушка. Гонка за ?умностью? не должна идти в ущерб надежности и детерминизму. Самая главная задача контроллера — гарантированно и в срок отработать управляющий алгоритм для гидравлического привода. Если из-за фоновой передачи гигабайтов телеметрии он пропустит критический цикл управления золотником, последствия могут быть катастрофическими. Поэтому архитектура должна быть грамотной: тяжелые сетевые задачи — на отдельный сопроцессор или шлюз, а ядро, отвечающее за управление, должно быть изолировано и работать с высшим приоритетом.
Глядя на ассортимент таких компаний, как упомянутая ООО ?Викс?, видишь, что гидравлические компоненты сами по себе становятся ?умнее?. Те же высококлассные плунжерные насосы серии A4VSO или A10VSO по сути готовы к интеграции в цифровой контур управления. Им нужен уже не аналоговый сигнал 0-10В, а цифровая шина, по которой можно задать не только давление, но и массу параметров работы. И вот здесь современный контроллер должен быть готов к такому диалогу — поддерживать не только старые добрые протоколы, но и CANopen, EtherCAT, PROFINET. Без этого не будет ни точности, ни той самой предиктивной аналитики.
Вместо заключения: субъективный чек-лист
Так о чем же думать, выбирая или настраивая контроллер для гидравлики? Не претендую на истину, но для себя сформировал некий список. Во-первых, адекватность интерфейсов: хватит ли быстрых аналоговых или цифровых входов/выходов под мои датчики и клапаны? Во-вторых, вычислительная мощность с запасом, особенно если есть сложные ПИД-регуляторы или прогнозирующие алгоритмы. В-третьих, среда эксплуатации — IP-рейтинг, стойкость к вибрации.
Далее — программная среда. Удобно ли писать логику? Есть ли встроенные библиотеки для работы с гидравлическими приводами (редко, но бывает)? Хорошая ли диагностика? Потом — вопрос связи. Нужна ли интеграция с верхним уровнем или смежными системами? И, пожалуй, самый главный пункт: насколько я, как инженер, понимаю тот гидравлический процесс, которым буду управлять? Без этого даже самый продвинутый контроллер — просто дорогая игрушка.
В конечном счете, промышленный контроллер — это продолжение инженерной мысли. Он не решает проблемы сам по себе. Он лишь инструмент, который позволяет воплотить правильное алгоритмическое решение для управления физическим объектом — будь то мощный шестеренный насос или точный сервопривод. И когда это сопряжение сделано грамотно, с пониманием механики, гидравлики и возможностей ?железа?, система работает не просто стабильно — она работает красиво. А это, пожалуй, и есть главная профессиональная радость.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты








Связанный поиск
Связанный поиск- Система управления сервоприводом переменного тока
- Одинарный пластинчатый насос
- гидравлический насос электро
- серводвигатель для станка
- Гидравлический насос и гидравлический мотор
- реверсивный гидравлический насос
- Серводвигатель в литьевой машине
- Планетарный редуктор скорости
- Поставщик систем электропривода пластификации для ТПА
- Сдвоенный гидравлический пластинчатый насос



