

Прямой приводной поворотный серводвигатель
Когда говорят о прямом приводном поворотном серводвигателе, многие сразу представляют себе что-то из мира робототехники или высокоточных станков. Но в гидравлике, особенно в контурах с высоким динамическим откликом, эта тема имеет свои, весьма специфические грани. Часто встречается заблуждение, что это просто мотор с обратной связью, поставленный на поворотный узел. На деле же, интеграция такого привода в систему, где уже работают, скажем, насосы серии VG под 40 МПа или инновационные ABT сервопластинчатые насосы, — это отдельная история, полная компромиссов.
Контекст и базовое недопонимание
Основная путаница начинается с термина ?прямой привод?. В электромеханике это часто означает отсутствие редуктора. В нашем же, гидравлическом контексте, речь скорее о прямом, минимально инерционном воздействии сервоуправляемого потока или давления на исполнительный поворотный орган. То есть, между золотником сервораспределителя и, собственно, камерой мотора или поворотного гидроцилиндра не должно быть ничего лишнего — длинных трубопроводов, объемных демпферов, которые вносят фазу и убивают быстродействие.
Помню, одну из первых попыток реализовать подобное делали для позиционирования стрелы манипулятора. Стояла задача — высокая точность остановки при значительном моменте. Использовали стандартный аксиально-поршневой мотор с планетарным редуктором и сервораспределителем. Казалось бы, логично. Но точность была нестабильной, особенно при смене направления. Проблема оказалась не в моторе и не в сервоклапане, а в упругости и зазорах в самом редукторе. Вот тогда и пришла мысль: а что если убрать это звено? Так мы вышли на концепцию прямого привода, где поворотный серводвигатель — это, по сути, гидромотор специальной конструкции, оптимизированный под прямое управление от сервораспределителя.
Это не всегда вращательное движение в 360 градусов. Чаще — поворот на ограниченный угол, 90, 180, 270 градусов. Но ключевое — высокое разрешение по углу и скорость отклика. И здесь уже нельзя просто взять любой гидромотор из каталога, даже такой продвинутый, как серии M4D или M4E от того же Vicks. Нужна своя, особая механика.
Интеграция с насосными станциями: где кроется сложность
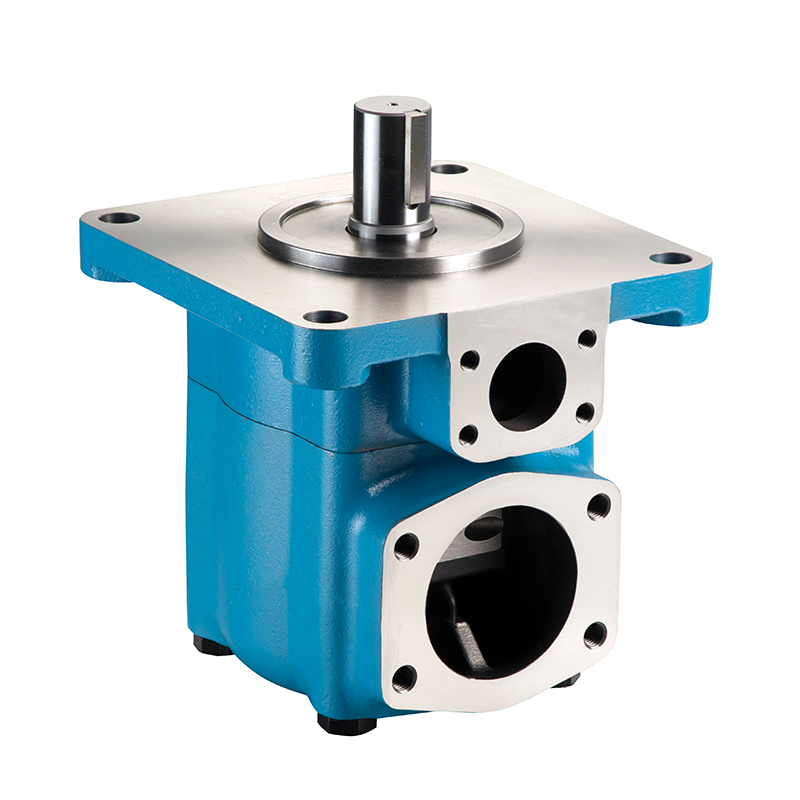
Теперь о питании. Прямой приводной поворотный серводвигатель — потребитель капризный. Ему нужен качественный, стабильный и, что важно, быстрорегулируемый поток. Если источником питания выступает обычный шестеренный насос, даже такой надежный, как серия VG, способный держать 4000 об/мин и 40 МПа, могут возникнуть проблемы с точностью позиционирования на низких скоростях. Шестеренка имеет свою пульсацию, свою жесткость характеристики.
Идеальным партнером здесь видятся именно сервопластинчатые насосы, например, те самые ABT-серии или серии VQ, о которых много информации на сайте ООО Викс Интеллектуальное Оборудование (Нинбо). Их способность точно и быстро менять рабочий объем в ответ на сигнал управления — это то, что нужно. Но и здесь не без подводных камней. Настройка регулятора давления и расхода такого насоса под специфические динамические нагрузки от резко стартующего и останавливающегося поворотного двигателя — это целое искусство. Бывали случаи, когда система входила в колебания из-за того, что отклик насоса был быстрее, чем мог среагировать механизм обратной связи самого серводвигателя.
Поэтому, просматривая каталог компонентов на https://www.vickshyd.ru, я всегда обращаю внимание не только на параметры насосов, но и на рекомендации по их интеграции в замкнутые сервоконтуры. Наличие таких данных — хороший признак.
Конструктивные особенности и ?болезни?
Каким должен быть сам двигатель? Первое — минимальный момент инерции ротора. Это достигается за счет особых конструкций. Иногда это модификация аксиально-поршневой схемы с малым диаметром поршней, но большим их количеством для плавности хода. Иногда — радиально-поршневое исполнение, компактное, но сложное в производстве.
Второе — датчики обратной связи. Резольверы или высокоточные энкодеры — обязательны. И их монтаж должен быть идеально соосным, люфт недопустим. Одна из накладок на испытаниях произошла именно из-за этого: вибрация постепенно разболтала крепление энкодера, и точность позиционирования начала ?плыть?. Пришлось разрабатывать новый, более жесткий узел крепления.
Третье, и очень важное — уплотнения. При высоких динамических нагрузках, частых реверсах, стандартные уплотнения вала быстро изнашиваются, начинают подтекать. Приходится искать специальные решения, часто с применением полимерных материалов, стойких к трению и перепадам температур. Это та деталь, которую в спецификациях часто упускают, но на практике она выходит на первый план.
Случай из практики: неудача, которая многому научила
Хочу привести пример, где не все пошло по плану. Задача была — поворот тяжелой платформы на 120 градусов с точностью до 0.1 градуса. Взяли за основу конструкцию прямого приводного поворотного серводвигателя на базе аксиально-поршневого блока от одного из аналогов A4VSO, но меньшего типоразмера. Источник — сервопластинчатый насос серии V20. Система собрана, настроена на стенде — работает безупречно.
Смонтировали на объекте, запустили — и начались проблемы с точностью в крайних положениях. Анализ показал, что виновата не гидравлика, а... фундамент. Жесткость конструкции, на которую был установлен весь узел, оказалась недостаточной. При создании момента, возникал микропрогиб, который датчик, установленный на валу двигателя, не видел, а вот нагрузка — чувствовала. Получалась ошибка по положению. Пришлось усиливать конструкцию, вносить поправки в алгоритм управления, учитывающие упругую деформацию. Вывод: для прямого привода механическая жесткость системы — не пожелание, а обязательное условие. Он не прощает слабины.
Этот опыт также показал, что даже с идеально подобранными компонентами, такими как высококлассные плунжерные насосы серии A10VSO для другого контура того же стенда, успех определяется системным подходом. Нельзя изолированно рассматривать гидродвигатель.
Будущее и нишевое применение
Куда движется эта технология? Видится тенденция к еще большей компактности и интеграции. Уже появляются решения, где сервораспределитель, датчик обратной связи и сам поворотный гидродвигатель собраны в единый моноблок. Это сокращает трубопроводы, уменьшает несжимаемые объемы и повышает общую жесткость контура.
Основные области применения, помимо робототехники, — это испытательные стенды (где нужно точно позиционировать нагрузку), специальное технологическое оборудование (например, в производстве композитов), симуляторы движения. Там, где нужны высокие моменты, точность и надежность в условиях частых циклов, а электрические приводы либо не дотягивают по мощности/массе, либо нежелательны из-за взрывоопасности или других средовых факторов.
Работая с такими системами, постоянно обращаешься к опыту поставщиков ключевых компонентов. Сайт https://www.vickshyd.ru, например, полезен не просто как каталог, а как источник информации о граничных условиях работы насосов и моторов. Понимание того, как поведет себя, скажем, пластинчатый мотор серии 35M под длительной нагрузкой с частыми остановками, помогает спрогнозировать поведение всего поворотного узла.
В итоге, прямой приводной поворотный серводвигатель — это не готовый продукт, который можно купить и поставить. Это система, которую нужно грамотно спроектировать, собрав воедино правильную гидравлику, механику и электронику. И ключ к успеху — в глубоком понимании взаимодействия всех этих частей, включая такие, казалось бы, базовые вещи, как характеристики питающего насоса. Ошибки здесь дорого стоят, но и результат, когда все сходится, того стоит.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Серия 50V
Серия 50V -
 СЕРВОНАСОСНЫЕ АГРЕГАТЫ
СЕРВОНАСОСНЫЕ АГРЕГАТЫ -
 Лопастной насос T7-E для привода с регулируемой скоростью
Лопастной насос T7-E для привода с регулируемой скоростью -
 ВНУТРЕННИЙ ШЕСТЕРЕНЧАТЫЙ НАСОС VG – ОДНОНАСОСНЫЙ
ВНУТРЕННИЙ ШЕСТЕРЕНЧАТЫЙ НАСОС VG – ОДНОНАСОСНЫЙ -
 Сдвоенный насос T6GCC, T67GCB, T7GBB
Сдвоенный насос T6GCC, T67GCB, T7GBB -
 Интегрированная сервомашина
Интегрированная сервомашина -
 PHYSIS Сервомотор для поверхностного монтажа — ультратонкая серия
PHYSIS Сервомотор для поверхностного монтажа — ультратонкая серия -
 Тройные насосы SQP
Тройные насосы SQP -
 VG ВНУТРЕННИЙ ЗУБЧАТЫЙ НАСОС-КОМБИНИРОВАННЫЙ НАСОС
VG ВНУТРЕННИЙ ЗУБЧАТЫЙ НАСОС-КОМБИНИРОВАННЫЙ НАСОС -
 Тройной насос T67DBB(S),T6DDC
Тройной насос T67DBB(S),T6DDC -
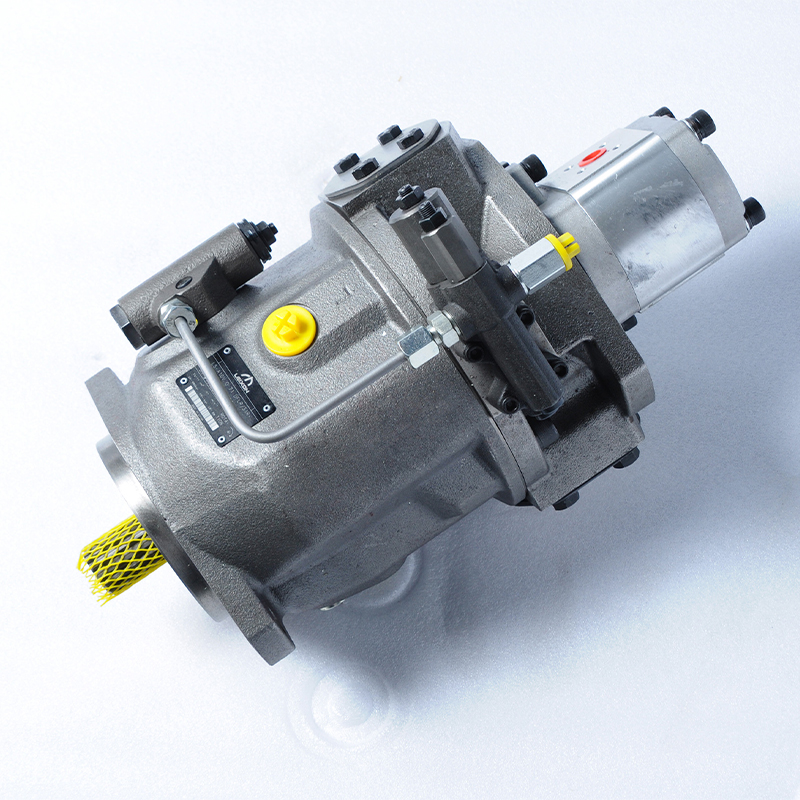 Плунжерный насос LA10VSO31
Плунжерный насос LA10VSO31 -
 Сдвоенный насос SQP
Сдвоенный насос SQP



