

серводвигатель с энкодером
Когда говорят ?серводвигатель с энкодером?, многие сразу представляют себе просто мотор с датчиком обратной связи. Но на практике это целая история про точность, динамику и, что часто упускают, про правильный выбор компонентов под конкретную задачу. Частая ошибка — считать, что купил ?серву? с высоким разрешением энкодера и получил готовое решение. А потом начинаются проблемы с настройкой, перегревом или несоответствием момента на низких оборотах. Сам через это проходил.
Энкодер — это глаза системы, но что он видит?
Тут важно не только разрешение в битах или импульсах. Важно, как энкодер интегрирован в двигатель, какой тип обратной связи используется — инкрементальный, абсолютный, с интерфейсом типа EnDat или чисто аналоговые синус-косинусные сигналы. В прецизионных станках, где мы интегрировали гидравлические контуры с электрическим сервоприводом, абсолютный энкодер спас от долгой итерации поиска нулевой точки после каждого отключения питания. Но за это платишь деньгами и сложностью настройки драйвера.
Был случай с одним прессом, где заказчик требовал позиционирование плиты с точностью до 5 микрон. Поставили серводвигатель с многооборотным абсолютным энкодером. Казалось бы, идеально. Но система гидравлики, а именно — насосы подачи — не успевали за динамикой электро-сервооси. Двигатель с энкодером выдавал идеальную траекторию, а гидравлическая часть ?плыла?, создавая пульсации. Пришлось глубоко лезть в настройки ПИД-регуляторов и согласовывать работу всего контура. Это к вопросу о том, что серводвигатель с энкодером — лишь часть пазла.
Кстати, о гидравлике. Когда речь идет о тяжелых или высокодинамичных приводах, часто используется не чисто электрический сервопривод, а электрогидравлический. Здесь серводвигатель (часто это просто высокомоментный бесщеточный мотор) вращает вал насоса, а энкодер стоит на валу двигателя или, что точнее, на гидромоторе или линейном приводе. Точность тогда определяется уже не только энкодером на двигателе, но и датчиком положения на конечном органе. Получается каскадная система обратной связи. Сложно, но для усилий в десятки тонн и скоростей выше метра в секунду — часто единственный вариант.
Где важна связка с гидравлическими компонентами
Вот здесь опыт работы с компаниями, которые поставляют ключевые компоненты, становится критичным. Возьмем, к примеру, ООО Викс Интеллектуальное Оборудование (Нинбо). На их сайте vickshyd.ru видно, что они фокусируются на основных гидравлических компонентах. Для систем с сервоприводом это особенно актуально. Если у тебя стоит высокоточный серводвигатель с энкодером, который управляет, скажем, золотником пропорционального клапана или углом наклона шайбы аксиально-поршневого насоса, то качество и отзывчивость этих гидравлических компонентов определяют итоговую точность всей системы.
Рассмотрим их номенклатуру. Высоконапорные шестеренные насосы серии VG (40 МПа, 4000 об/мин). Для серво-контура это может быть насос питания, и его пульсации напрямую влияют на стабильность давления, а значит, и на точность позиционирования гидроцилиндра, которым управляет сервоклапан. Если насос шумный или имеет высокий уровень пульсаций, даже самый лучший энкодер и драйвер не спасут от вибраций в конечной позиции.
Особенно интересна их линейка мировых инновационных ABT сервопластинчатых насосов (серии T6, T7 и др.). Сервопластинчатые насосы — это уже шаг в сторону энергоэффективности и точного управления давлением и потоком. Представь систему, где серводвигатель с энкодером регулирует производительность такого насоса в зависимости от потребности исполнительных механизмов. Это уже не просто включение/выключение, а полноценное сервоуправление на стороне гидравлического питания. Экономия энергии может быть колоссальной, но требует тонкой настройки и понимания, как динамика насоса согласуется с динамикой основного привода.
Практические грабли: момент, перегрев и совместимость
Один из самых болезненных уроков — это выбор двигателя по номинальному моменту, без учета момента на высоких скоростях и, что важнее, момента на низких оборотах. Для задач прецизионного позиционирования или медленного нагружения (как в испытательных стендах) требуется высокий момент в почти статическом режиме. Многие стандартные серводвигатели здесь перегреваются, потому что охлаждение рассчитано на работу в зоне номинальных оборотов. Приходится или брать двигатель на размер больше, или закладывать принудительное охлаждение. Энкодер в таких условиях тоже должен быть стойким к вибрациям и возможному тепловому воздействию от корпуса двигателя.
Еще одна история — совместимость энкодера с драйвером. Казалось бы, стандарты есть. Но на деле, когда пытаешься заменить двигатель с энкодером от одного производителя на драйвер другого, может всплыть куча нюансов: уровень сигналов, тип питания датчика, протокол обмена данными. Однажды потратил два дня на то, чтобы заставить драйвер считать данные с абсолютного энкодера, потому что в документации к драйверу была ошибка в описании последовательности инициализации интерфейса. В таких случаях спасает только осциллограф и прямое общение с техподдержкой производителя, если она, конечно, адекватная.
И конечно, нельзя забывать про механическую часть. Прецизионный энкодер, установленный на валу двигателя, ничего не стоит, если есть люфт в муфте, соединяющей двигатель с редуктором или шариковинтовой парой. Или если сам редуктор имеет нелинейность и гистерезис. Часто проблемы с точностью позиционирования ищут в настройках ПИД, а корень — в простом механическом люфте или недостаточной жесткости крепления двигателя. Все должно быть жестко и точно соосно.
Интеграция в реальные проекты: пример с литьевой машиной
Приведу пример из прошлого проекта — модернизация узла смыкания на литьевой машине. Задача — обеспечить точное и быстрое позиционирование подвижной плиты, а также точное поддержание усилия смыкания. Использовался гидравлический цилиндр, управляемый пропорциональным сервоклапаном. Обратная связь по положению — линейный магнитострикционный датчик. Но для управления насосом питания решили применить схему с регулируемым насосом и серводвигателем с энкодером.
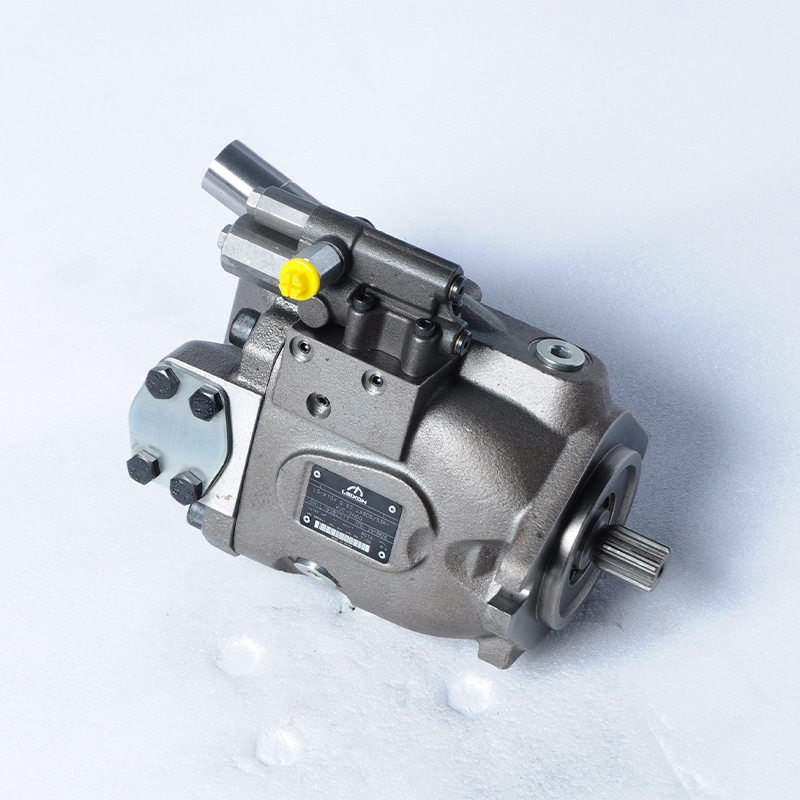
Серводвигатель управлял углом наклона шайбы аксиально-поршневого насоса (что-то вроде серии A4VSO/A10VSO, которые также есть в ассортименте Vicks). Энкодер на двигателе давал обратную связь о реальном положении шайбы (а значит, и о производительности насоса) для внутреннего контура управления сервоусилителя. Это позволило резко снизить потери на дросселирование в сервоклапане, так как насос подавал ровно столько масла, сколько требовалось в данный момент цикла. Экономия энергии достигла 40% по сравнению со старой системой с нерегулируемым насосом и дроссельным управлением.
Ключевым было согласовать работу двух сервоконтуров: контура положения плиты (на основе сервоклапана и линейного датчика) и контура управления производительностью насоса (на основе серводвигателя и его энкодера). Пришлось настраивать приоритеты и скорости отклика, чтобы при резком движении плиты насос успевал увеличить подачу, не создавая провалов давления. Здесь как раз пригодился опыт работы с быстрыми и точными гидрокомпонентами, где надежность обратной связи — основа.
В этом проекте мы рассматривали и вариант применения сервопластинчатого насоса от того же Vicks (серия ABT), как более тихого и, возможно, более подходящего по динамике варианта. Но на тот момент остановились на проверенных поршневых насосах из-за требований по пиковому давлению. Однако для других задач, например, в станциях испытания гидроагрегатов, где важна чистота потока и низкий уровень шума, сервопластинчатые насосы с электронным управлением выглядят крайне перспективно.
Взгляд вперед: цифровизация и диагностика
Современный серводвигатель с энкодером — это уже не просто привод. Это источник данных. Через интерфейс энкодера или непосредственно с драйвера можно снимать кучу информации: токи, температуру, фактические и заданные положения, ошибки перегрузки. В системах с гидравликой это бесценно для предиктивной аналитики. Например, рост тока двигателя, вращающего насос, при сохранении тех же параметров давления и расхода может указывать на износ насоса или увеличение вязкости масла из-за перегрева.
Если интегрировать данные с энкодера серводвигателя, управляющего, например, насосом, и с датчиков давления и расхода в общей SCADA-системе, можно строить очень точные цифровые двойники гидравлических контуров. Это позволяет не только оперативно находить неисправности, но и оптимизировать рабочие циклы, подбирать более эффективные режимы ускорения и замедления, минимизируя гидроудары и повышая общий ресурс оборудования.
В этом контексте поставщики компонентов, которые предлагают не просто железо, а элементы, готовые к интеграции в цифровую среду (с четкими характеристиками, цифровыми двойниками или хотя бы подробными динамическими моделями), получают серьезное преимущество. Потому что инженеру на объекте проще спроектировать и отладить систему, когда он понимает, как поведет себя, скажем, насос серии VG или сервопластинчатый насос T7 в связке с конкретным серводвигателем и его контроллером. Это уже уровень системного подхода, а не просто покупка деталей по каталогу.
В итоге, возвращаясь к началу. Серводвигатель с энкодером — это всегда история про систему. Про то, как его точность упирается в качество механической части, как его динамика согласуется с гидравликой или другим силовым приводом, и как данные с него можно использовать для чего-то большего, чем просто закрытие контура обратной связи. И понимание этого приходит только с опытом, часто горьким, когда что-то не работает так, как написано в идеальной спецификации на бумаге.
Соответствующая продукция
Соответствующая продукция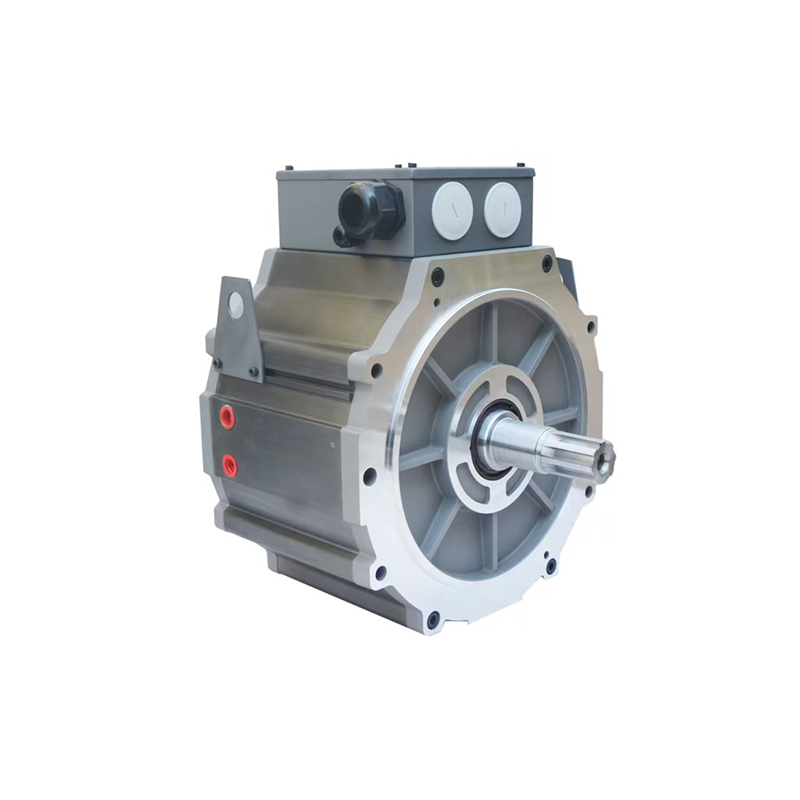







Самые продаваемые продукты
Самые продаваемые продукты










Связанный поиск
Связанный поиск- Пластинчатые моторы серии Vickers 50M
- Редуктор с высоким крутящим моментом
- Электрический шестеренный насос
- Одинарный шестеренный насос
- Пластинчатый насос Denison
- Двухступенчатый роторный пластинчатый насос
- Эквивалентный насос Parker Denison
- Прямой сервопривод
- Литьевая машина с гидравлическим зажимом
- Гидравлические клапаны



