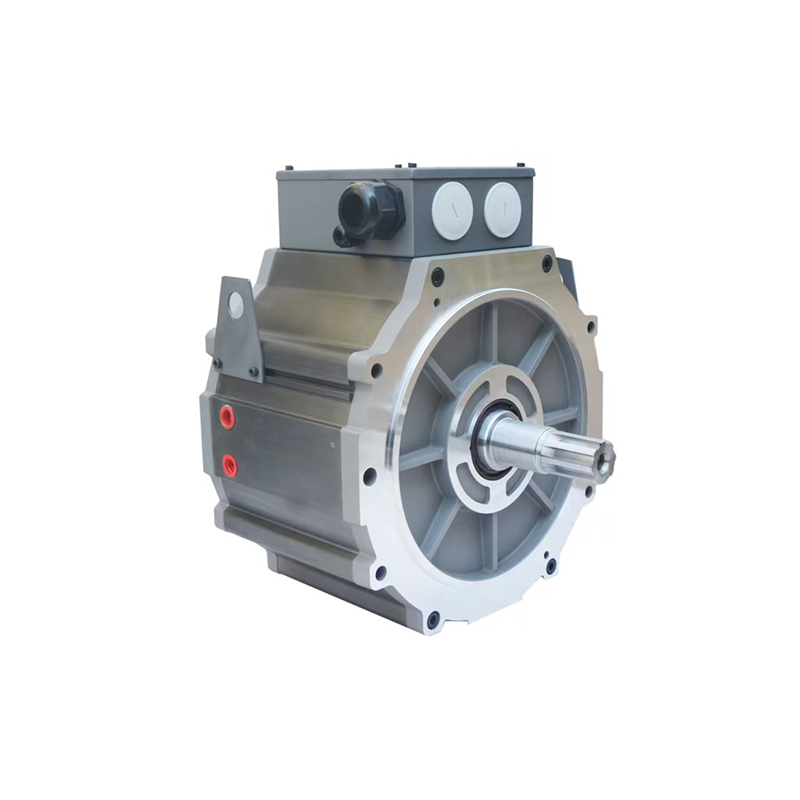
Сервопривод с драйвером двигателя
Когда слышишь 'сервопривод с драйвером двигателя', многие сразу представляют готовый модуль из каталога, который осталось только подключить. На деле, это часто начало долгой истории подбора, настройки и борьбы с нюансами. Ключевая ошибка — считать драйвер и двигатель абсолютно универсальным дуэтом, который сработает в любой системе. Особенно в гидравлике, где момент, скорость и, главное, динамика отклика — это связка механики, электроники и гидравлического контура. Вот, например, пытались мы как-то интегрировать стандартный сервопривод для управления золотником на насосе. Вроде бы всё по даташиту, но динамика системы была вялой, пока не поняли, что драйвер не 'вытягивает' нужную скорость нарастания тока из-за особенностей индуктивности обмоток именно этого мотора. Пришлось лезть в глубокие настройки ШИМ и петли тока. Это и есть та самая разница между теорией из учебника и реальным железом.
Где кроется сложность: интерфейс механики и электроники
Основная головная боль — это даже не сам сервопривод, а точка его сопряжения с гидравлической частью. Возьмем, к примеру, задачу управления наклоном блока в аксиально-плунжерном насосе. Тут нужен привод с высоким моментом на низких скоростях и, что критично, с очень жесткой механической конструкцией редуктора (если он есть), чтобы не было люфтов. Многие драйверы предлагают режим 'позиционирования с подавлением колебаний', но если механическая часть слабая, никакая электроника не спасет. На практике часто видишь, как система 'рыскает' вокруг заданной точки, а инженеры начинают крутить фильтры в драйвере, хотя проблема в люфте тяги или в недостаточной жесткости крепления сервомотора.
Еще один нюанс — обратная связь. В гидравлике часто нужна не просто позиция вала сервомотора, а положение, скажем, плунжера или золотника. Ставят дополнительный датчик — линейный энкодер или даже LVDT. И вот тут начинается танце с синхронизацией данных: драйвер двигателя работает со своим энкодером на валу, а контур управления требует данные с внешнего датчика. Нужно либо искать драйвер с поддержкой второго контура обратной связи, что дорого, либо городить внешний ПИД-регулятор, что добавляет задержку. Видел решения, где эту задачу решали аналоговыми блоками управления от того же Vickers, но сейчас тренд — всё в цифре, в одном драйвере. Не всегда это получается гладко.
Кстати, о компонентах. Когда работаешь с высоконапорными системами, как те же шестеренные насосы серии VG от Vicks, где давление до 40 МПа, требования к точности и быстродействию управления запорной арматурой или регуляторами расхода — особые. Сервопривод здесь должен не просто переместить заслонку, а сделать это быстро, точно и выдержать постоянное усилие под давлением. Обычные шаговые двигатели с драйверами в open-loop часто не справляются — теряют шаг. Нужен именно замкнутый контур, сервопривод с энкодером и драйвером, способным отрабатывать резкие изменения нагрузки. И это уже не просто 'коробка', а система, которую нужно рассчитывать под конкретный насос и конкретный технологический цикл.
Опыт интеграции: пример с пластинчатыми насосами
Хороший практический пример — это управление компенсацией давления в современных сервопластинчатых насосах, вроде тех же инновационных серий ABT, которые представлены, например, на https://www.vickshyd.ru (ресурс ООО 'Викс Интеллектуальное Оборудование (Нинбо)'). Там часто стоит задача плавно и точно менять рабочий объем в зависимости от нагрузки. Механически это может делаться через сервопривод, который двигает статорную плиту. И вот тут выбор драйвера двигателя решает всё.
Мы пробовали ставить стандартный драйвер с CANopen-интерфейсом. В теории — идеально: отправляешь задание по сети, получаешь статус. На практике возникла проблема с временными задержками (jitter) в сети, особенно при высокой загрузке шины другими устройствами. Это приводило к мелкой, но раздражающей пульсации давления на выходе насоса. Система вроде работала, но по манометру было видно 'дрожание' стрелки. Пришлось переходить на аналоговое задание ±10В или на драйвер с высокоскоростным аппаратным портом (типа EtherCAT), что, конечно, удорожало решение. Вывод: интерфейс связи драйвера — не второстепенная вещь для гидравлики, где процессы быстрые.
Еще один момент по пластинчатым моторам серий M4 или NHM. Иногда их используют в приводах подачи, где нужен точный контроль скорости. Если ставить сервопривод с драйвером двигателя, можно получить отличную динамику. Но! Гидромотор — это не идеальный исполнительный механизм, у него есть своя неравномерность вращения, особенно на низких оборотах. Драйвер, получая обратную связь от энкодера на валу мотора, начинает 'бороться' с этой внутренней неравномерностью, воспринимая ее как ошибку позиционирования. Это может привести к перегреву и лишнему износу. Приходится искусственно 'загрублять' петлю регулирования или использовать специальные алгоритмы сглаживания, которые есть далеко не во всех драйверах. Иногда проще и дешевле оказывается использовать частотник с векторным управлением и хорошим энкодером, но это уже не совсем сервопривод в классическом понимании.
Провалы и находки: когда теория не работает
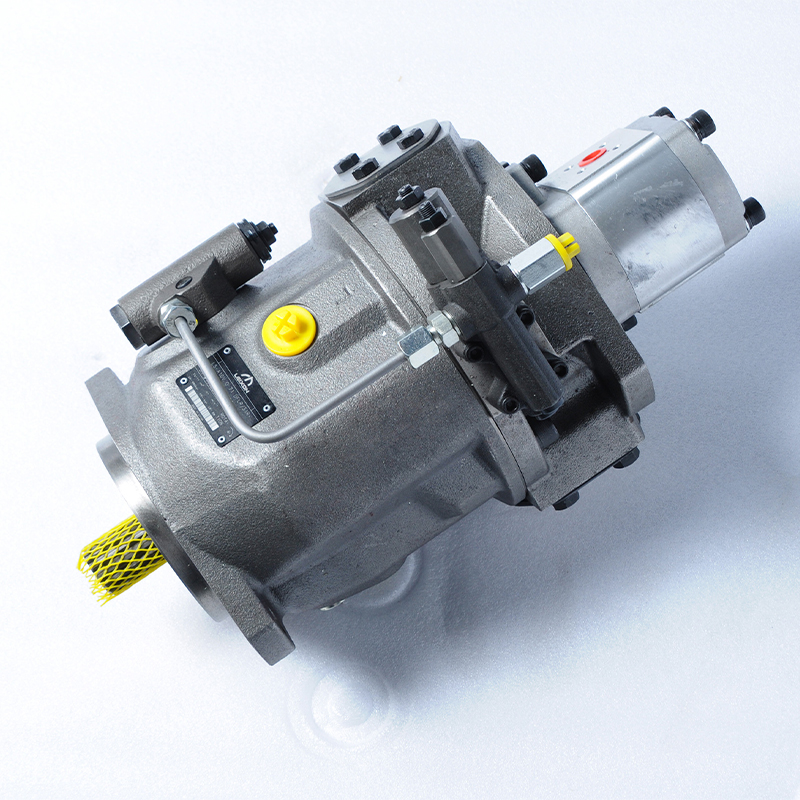
Был у нас проект с плунжерным насосом высокого давления, что-то вроде серии A10VSO. Нужно было реализовать точное регулирование производительности. Поставили компактный сервопривод с, казалось бы, мощным драйвером. Все расчеты по моменту и скорости сходились. Но при первых же испытаниях драйвер уходил в ошибку 'перегрузка по току' в моменты резкого старта. Оказалось, мы не учли инерцию всей вращающейся массы гидравлической части — не только ротора двигателя, но и вала насоса с плунжерным блоком. Драйвер был рассчитан на разгон только инерции собственного ротора, а динамический момент для разгона всей системы оказался слишком велик. Пришлось менять драйвер на модель с большим запасом по пиковому току и активно использовать функцию 'плавного разгона' (S-кривая), хотя изначально хотелось максимально быстрого отклика. Это классическая ошибка: смотреть только на статический момент, забывая про динамику.
Другой случай связан с нагревом. Сервопривод с драйвером двигателя в закрытом шкафу рядом с гидробаком — это гремучая смесь. Драйверы, особенно в режиме удержания позиции под нагрузкой, могут выделять прилично тепла. А если вокруг еще и гидравлика греется... Видел, как 'отваливалась' система просто из-за тепловой защиты драйвера в самый ответственный момент. Решение банальное — принудительное охлаждение и правильный расчет установочной мощности, но почему-то об этом часто вспоминают постфактум, когда оборудование уже смонтировано.
И конечно, софт. Многие современные драйверы требуют тонкой настройки через специализированное ПО. И вот тут открывается простор для ошибок. Можно 'сломать' работу системы, неправильно задав коэффициент усиления в петле тока или неправильно настроив фильтр энкодера. Однажды из-за слишком агрессивного фильтра по скорости система потеряла устойчивость и вошла в низкочастотные колебания. Долго искали причину в механике, а оказалось — в одной галочке в программном обеспечении драйвера. Теперь всегда сначала сбрасываю настройки на 'по умолчанию' и меняю по одной-две параметра за раз, записывая результат. Старая школа, но работает безотказно.
Что в сухом остатке? Практические советы
Итак, если обобщить, то работа с сервоприводом и драйвером двигателя в гидравлике — это постоянный поиск компромисса. Между быстродействием и устойчивостью, между точностью и стоимостью, между возможностями 'железа' и сложностью его настройки. Нельзя просто взять первую попавшуюся пару из каталога. Нужно глубоко анализировать механическую нагрузку, инерцию, характер рабочего цикла и, что очень важно, условия окружающей среды.
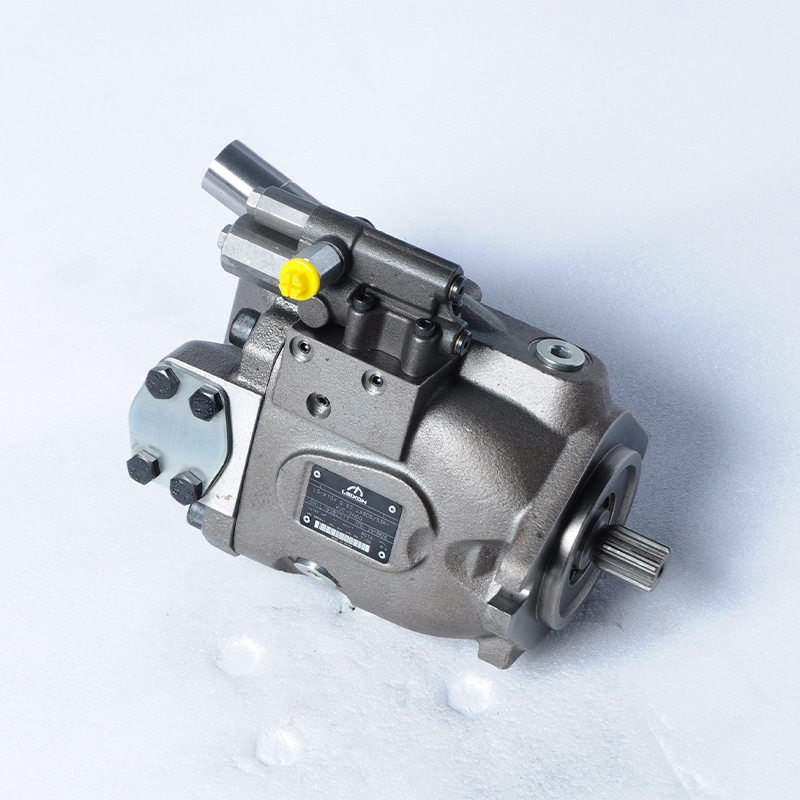
Всегда стоит запрашивать у производителя или дистрибьютора, вроде упомянутой компании ООО 'Викс Интеллектуальное Оборудование', не просто даташиты, а примеры успешной интеграции их компонентов с конкретными типами гидравлических машин — будь то насосы серии VG, пластинчатые моторы M3B/M4C или плунжерные насосы A4VSO. Часто у них есть уже отработанные связки и рекомендации по настройке драйверов, которые могут сэкономить недели отладки.
И последнее. Не стоит бояться, если с первого раза система не заработала идеально. Сервопривод с драйвером двигателя — это гибкий инструмент. Часто проблемы решаются не заменой оборудования, а кропотливой настройкой. Нужно понимать, как работают петли регулирования (ток, скорость, позиция), уметь снимать осциллограммы сигналов, анализировать графики. Это уже не монтаж, это инжиниринг. Но когда всё сходится, и гидравлическая система начинает работать точно, быстро и предсказуемо — ради этого и стоит в это погружаться. Главное — помнить, что за цифрами в софте стоят реальные физические процессы в железе и масле.
Соответствующая продукция
Соответствующая продукция