

сервосистема переменного тока
Когда говорят о сервосистемах, многие сразу представляют себе серводвигатель и драйвер. Но если копнуть глубже, особенно в контексте тяжелого гидравлического оборудования, где мы работаем, то понимаешь, что сервосистема переменного тока — это прежде всего система управления, а не отдельный компонент. Частая ошибка — считать, что, установив современный сервопривод на насос, ты сразу получишь и точность, и энергоэффективность. На практике же все упирается в интеграцию: как эта электрическая система 'поговорит' с гидравлической частью, например, с тем же высоконапорным шестеренным насосом серии VG, который у нас в работе. Тут и начинаются настоящие сложности.
От теории к стенду: где возникает диссонанс
Взять, к примеру, задачу точного позиционирования тяжелой плиты на прессе. Ставишь современный сервокомплект, программируешь цикл. На бумаге и на малых оборотах все идеально. Но как только включаешь реальную нагрузку и требуешь от системы пиковой производительности — скажем, нужно быстро выйти на давление в 40 МПа, которое держит насос VG, — начинаются сюрпризы. Электрический сервопривод отрабатывает свою кривую, а гидравлика имеет свою инерцию и, что важнее, нелинейность расхода. Получается не синхрон, а своеобразный 'разговор глухих'. Сигнал обратной связи по току есть, а плавного хода нет. Это классическая история, когда проектировщики оптимизируют контуры по отдельности, забывая про общую динамику.
Мы как-то пытались адаптировать систему под пластинчатый насос серии V10, позиционируемый как энергоэффективный. Логика была: сервопривод будет точно дозировать скорость вращения, а насос с переменным рабочим объемом — минимизировать потери. Но на практике алгоритм управления объемом насоса и алгоритм разгона/торможения сервомотора конфликтовали. Возникали низкочастотные пульсации, которые датчик положения вала серводвигателя, конечно, не видел, но которые прекрасно чувствовался в конечном механизме — рывки были заметны невооруженным глазом. Пришлось глубоко лезть в параметры ПИД-регулятора драйвера и настраивать его не по мануалу к двигателю, а по фактическому отклику всей гидросистемы. Это к вопросу о 'коробочных' решениях — они редко работают.
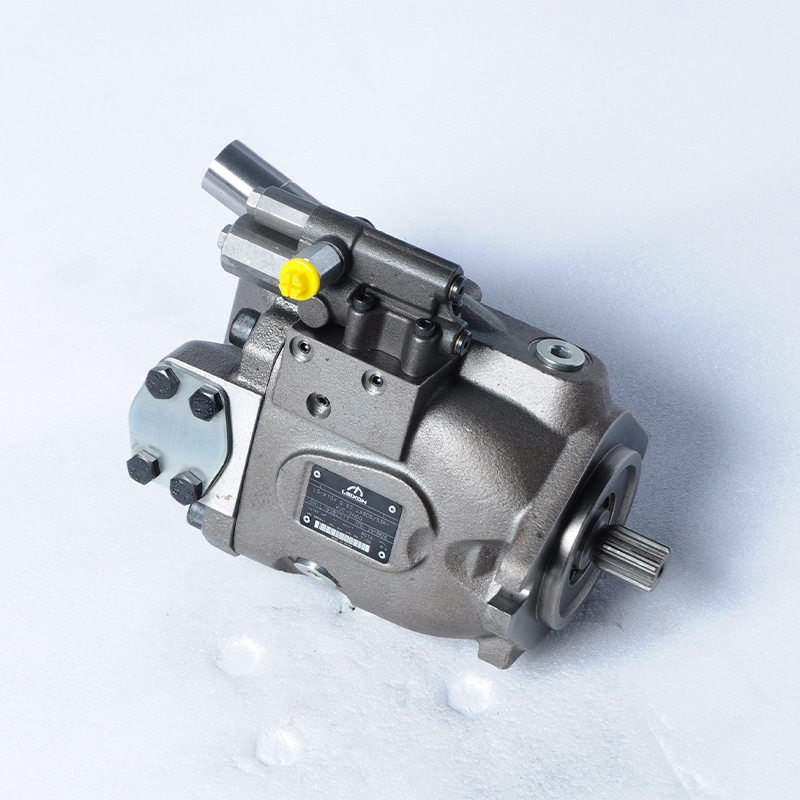
Еще один нюанс — выбор датчика обратной связи. Резольвер, энкодер... Для чисто электрического привода — вопрос предпочтений. Но в гибридной системе, где крутящий момент формируется давлением масла, а не только магнитным полем статора, критична скорость обновления данных. Задержка в пару миллисекунд в контуре по току может привести к автоколебаниям, когда насос уже сбросил давление, а двигатель еще 'разгоняется' по инерции. Особенно это чувствительно при работе с плунжерными насосами A10VSO, где переключение режимов очень резкое. Порой кажется, что нужно не стандартный энкодер ставить, а как-то комбинировать его данные с сигналом датчика давления на выходе насоса. Но такого готового интерфейса в драйверах, увы, не предусмотрено.
Интеграция с гидравликой: случай компании Vicks
Вот здесь опыт таких компаний, как ООО Викс Интеллектуальное Оборудование (Нинбо), становится бесценным. Они не просто продают насосы, вроде тех же инновационных ABT сервопластинчатых или надежных серий M4, а смотрят на систему в сборе. Заглянешь на их сайт vickshyd.ru — и видишь не просто каталог, а схемы применения, где указаны точки интеграции с системами управления. Это правильный подход. Потому что, когда имеешь дело с их моторами серии NHM, которые часто ставят в поворотные механизмы, понимаешь, что без точного контура управления по положению на основе сервопривода переменного тока их потенциал по плавности хода просто не раскрыть.
Я вспоминаю один проект с прессом, где использовался их пластинчатый мотор 35/36M. Задача была — синхронизировать два таких мотора на одной оси. Чисто гидравлическое решение с делителем потока давало погрешность. Перешли на схему, где каждый мотор приводился своим серводвигателем, а управление шло от общего контроллера. И тут выяснилась важная вещь: моментная характеристика мотора от Vicks, которую они предоставляли в документации, была снята при постоянном давлении. В динамике, при резком изменении задающего сигнала от сервопривода, характеристика 'плыла'. Пришлось совместно с их инженерами проводить дополнительные тесты на стенде, чтобы снять реальные графики и зашить поправочные коэффициенты в управляющую программу. Это тот самый случай, когда поставщик компонента становится партнером по настройке системы.
Или другой аспект — тепловыделение. Сервосистема переменного тока в непрерывном режиме работы с частыми пусками/остановами греется. А рядом стоит гидробак, температура масла в котором тоже растет. Получается тепловой купол. В одном из наших ранних проектов мы этого не учли. Сервоприводы, установленные вплотную к гидростанции с насосами серии PV2R, постоянно уходили в ошибку перегрева. Решение оказалось на стыке дисциплин: пришлось не только улучшать охлаждение шкафа управления, но и пересматривать гидравлическую схему — добавили теплообменник с принудительным охлаждением, чтобы снизить температуру масла на входе в насос. Это мелочь, но в мануалах по сервоприводам о таком не пишут, это знание из практики.
Программируемая логика против 'железных' ограничений
Современные сервоконтроллеры позволяют делать удивительные вещи: компенсацию люфта, адаптивную настройку на лету, сложные профили движения. Кажется, что можно программно решить любую проблему. Но гидравлика ставит свои 'железные' ограничения. Например, время отклика того же клапана пропорционального управления, который часто используется в связке с сервоприводом для управления насосом A4VSO. Ты можешь задать в программе идеально плавную синусоиду изменения скорости, но клапан физически не сможет отработать ее высокочастотную составляющую. В итоге получаешь искажение и потерю точности.
Мы однажды потратили неделю, пытаясь программно скомпенсировать небольшую пульсацию потока от шестеренного насоса внутреннего зацепления. Крутили фильтры в контуре управления, настраивали наблюдатели состояния. А потом просто поставили дополнительный демпфер (гаситель пульсаций) в напорную магистраль. Проблема ушла на 90%. Это был урок: прежде чем усложнять алгоритмы, нужно убедиться в чистоте 'физического' сигнала. Сервосистема, какой бы умной она ни была, не может побороть фундаментальные законы гидродинамики.
С другой стороны, программируемость дает огромное преимущество при обкатке и диагностике. Например, можно запрограммировать медленный 'прогон' гидромотора FMB на малых оборотах под управлением сервопривода, отслеживая токовую нагрузку. Резкий скачок тока в определенной позиции может указывать на внутреннее сопротивление или начинающийся износ. Это проактивная диагностика, которую трудно осуществить при обычном асинхронном приводе. То есть, правильно используемая сервосистема переменного тока становится не только исполнительным механизмом, но и инструментом мониторинга состояния дорогостоящей гидравлики.
Экономика решения: где оно действительно окупается
Говоря об энергоэффективности, все сразу вспоминают про режим 'серво'. Но выгода есть не всегда. Если у тебя станок работает в ударном режиме: 'включился — отработал полный цикл на максимальной мощности — выключился', то окупаемость сложной системы под вопросом. Другое дело — оборудование с переменной нагрузкой и длительными паузами, типа крупных манипуляторов или испытательных стендов. Вот там использование сервопривода для управления, например, насосом T6 с переменной производительностью дает ощутимую экономию на счетах за электричество. Но считать нужно честно: включая стоимость самого сервокомплекта, программирования, монтажа и более дорогого обслуживания.
У нас был опыт на одном из деревообрабатывающих комбинатов. Заменили обычный асинхронный привод на валу главного насоса (серия 50/51M) на сервосистему. Помимо энергосбережения, получили неожиданный бонус: возможность точно контролировать момент зажима заготовки. Это позволило работать с более хрупкими породами дерева, снизив процент брака. То есть экономический эффект пришел не только от экономии киловатт, но и от повышения качества продукции. Это важно донести до заказчика, когда обсуждаешь проект.
И последнее — надежность. Сервопривод — устройство сложное, с массой электроники. В цехах с вибрацией, запыленностью и перепадами температур он может стать дополнительной точкой отказа. Поэтому в тяжелых условиях иногда надежнее оказывается 'тупая' связка: асинхронный двигатель + частотник + гидравлический регулятор потока и давления. Пусть менее точно, но работает годами. Выбор в пользу сервосистемы переменного тока должен быть взвешенным и оправданным именно требованиями технологического процесса, а не просто желанием поставить 'самое современное'. Иногда простота — залог бесперебойности производства.
Вместо заключения: мысль вслух
Так что, возвращаясь к началу. Сервосистема переменного тока в гидравлике — это не продукт, а процесс. Проектирования, интеграции, тонкой настройки и, что немаловажно, обучения персонала. Потому что оператор, привыкший к рычагам и клапанам, должен понять логику работы через интерфейс ЧПУ. А это иногда сложнее, чем настроить ПИД-регулятор. Успех кроется в деталях: в том, как проложен кабель энкодера, чтобы он не попал под нагрев от гидролинии; в том, какие фильтры по питанию стоят перед драйвером; в том, насколько полная документация от поставщика гидрокомпонентов, как у тех же ребят из Vicks. Это и есть та самая 'интеллектуальность' оборудования, которая складывается из мелочей, а не покупается в одной коробке. И пока есть этот зазор между теорией автоматического управления и практикой гидравлических систем, работа для инженеров-настройщиков, которые понимают и то, и другое, точно не иссякнет.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты








Связанный поиск
Связанный поиск- Сервопривод на основе АД
- сервоуправляющая система
- Прямой двигатель с высоким крутящим моментом
- Высокоточная литьевая машина
- промышленный масляный насос
- Гидравлический ТПА
- Автоматическая литьевая машина
- высокопроизводительный сервопривод
- синхронный серводвигатель с постоянными магнитами
- Гидравлический контроллер в системе управления



