

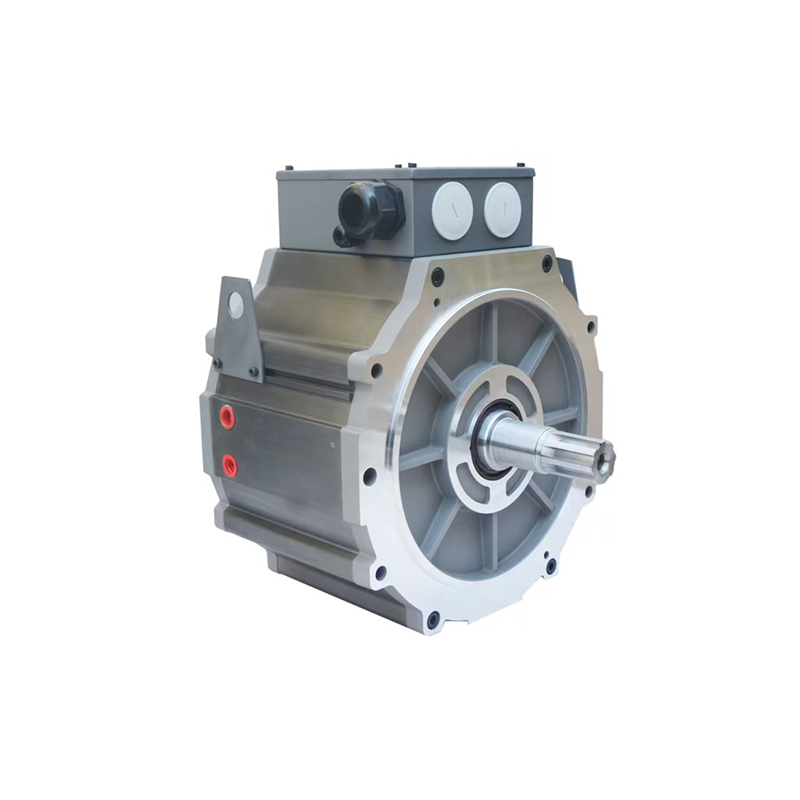
Силовой серводвигатель
Когда говорят ?силовой серводвигатель?, многие сразу представляют себе высокооборотистый синхронник с энкодером, который стоит в станке. Но в тяжелой гидравлике все иначе. Здесь речь идет об агрегате, который должен не просто точно позиционировать, а удерживать или перемещать тонны под переменной нагрузкой, часто в грязных условиях. И это не только электромеханика. Чаще всего — это связка гидромотора высокого момента с высокоточным сервоклапаном и датчиком обратной связи. И вот тут начинаются настоящие сложности.
От термина к железу: что скрывается за названием
В наших проектах, скажем, для прессов или испытательных стендов, под ?силовым серводвигателем? мы подразумеваем именно гидравлический исполнительный механизм с замкнутым контуром управления. Основа — надежный аксиально-плунжерный мотор, способный выдать нужный крутящий момент на низких оборотах. Электрическая часть — это сервоусилитель и контроллер. Но сердце системы — это золотниковый или струйный сервоклапан, который управляет потоком масла. Его быстродействие и линейность определяют всё.
Частая ошибка — пытаться сэкономить на клапане, поставив пропорциональный вместо серво. В статике разницы может и не быть, но при динамическом нагружении, когда нагрузка меняется несколько раз в секунду, пропорциональный клапан начинает ?плавать?. Запаздывание в 50-100 мс убивает всю точность. Система не успевает компенсировать, начинаются автоколебания. Переделали такую схему на одном стенде для испытания рессор — заменили пропорциональный клапан на сервоклапан от Rexroth, и сразу ушла вибрация, позиционирование упора стало четким.
Еще один нюанс — подготовка масла. Для сервосистемы чистота масла по ISO 4406 должна быть не ниже 18/16/13, а лучше 16/14/11. Иначе тонкие каналы в золотнике клапана забиваются, он клинит. Ставили систему на лесозаготовительном комбайне — заказчик жаловался на рывки в движении манипулятора. При вскрытии обнаружили, что встроенный фильтр в гидроблоке был на 25 микрон, а нужно минимум 10, а то и 5. Сменили фильтры, промыли систему — работа нормализовалась. Это та цена, которую платишь за высокую динамику.
Интеграция компонентов: где кроются неочевидные проблемы
Собрать систему из хороших комплектующих — это полдела. Их нужно заставить работать вместе. Вот, к примеру, берем плунжерный мотор. Допустим, нужен большой момент на валу. Можно взять мотор с большим рабочим объемом, но тогда падает быстродействие — инерция ротора и большой объем масла для его поворота. А можно использовать редуктор. Но тут появляется люфт, упругость вала, которые контур управления должен учитывать. Настройка ПИД-регулятора превращается в шаманство.
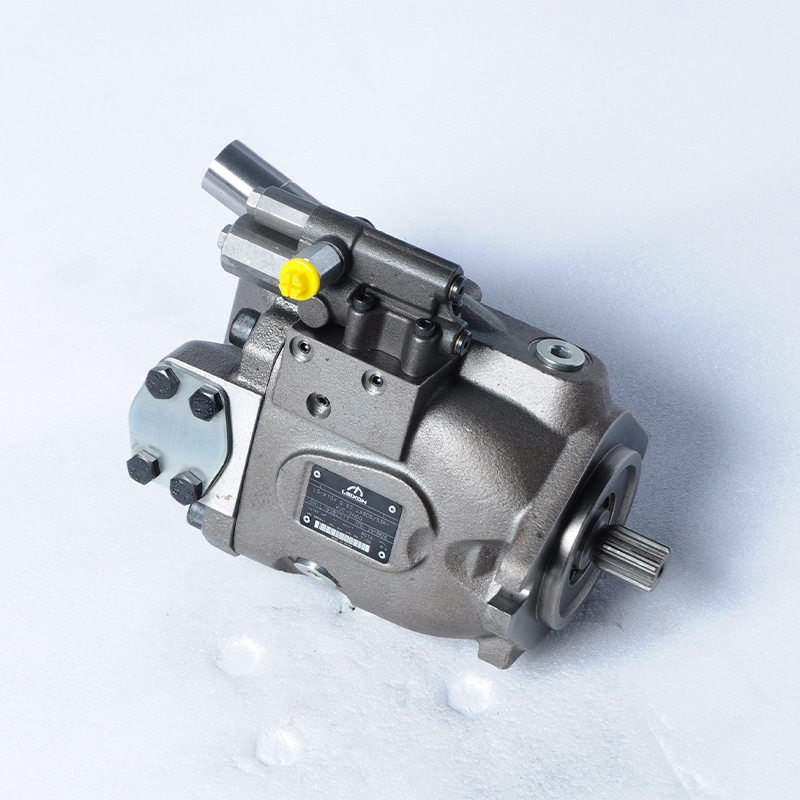
В одном проекте с поворотной платформой использовали мотор серии A4VSO в режиме гидромотора вместе с планетарным редуктором. Задача — точная остановка в заданном секторе. Энкодер стоял на валу мотора, а не на выходе редуктора. Теоретически, это должно дать более точное позиционирование. Но на практике упругая деформация вала редуктора и его люфт в 10 угловых минут давали ошибку, которую датчик на моторе ?не видел?. Платформа останавливалась, а потом из-за остаточного напряжения в ?упругом? редукторе смещалась еще на эти самые минуты. Пришлось ставить дополнительный высокоточный датчик угла прямо на платформу и настраивать двухконтурную систему. Дорого, но точно.
Здесь же стоит упомянуть и о насосной станции. Для сервопривода нужен источник постоянного давления, не зависящий от расхода. Часто используют аксиально-плунжерные насосы с регулятором давления. Но если в системе несколько силовых серводвигателей, которые работают не синхронно, давление в магистрали будет прыгать. Насос с обычным регулятором не успевает реагировать. В таких случаях смотрели в сторону насосов с сервоуправлением, тех же A10VSO с электронным пропорциональным управлением. Они могут динамически поддерживать давление, но их применение упирается в стоимость и сложность управления.
Пример из практики: пресс с сервоприводом подачи
Был у нас заказ — модернизация гидравлического пресса. Нужно было заменить старую систему объемного регулирования подачи ползуна на сервоприводную для точного контроля скорости и силы в ходе всего технологического цикла. Основной силовой элемент — два больших гидроцилиндра. Но управляли мы ими не напрямую, а через сервоклапаны, которые подавали масло от насосной станции. А вот насосная станция была построена на базе нескольких шестеренных насосов внутреннего зацепления.
Изначально рассматривали вариант с плунжерными насосами, но заказчик настаивал на надежности и меньшей стоимости владения. Остановились на насосах серии VG, которые нам поставляла компания ООО Викс Интеллектуальное Оборудование (Нинбо). Их параметры (40 МПа, 4000 об/мин) с запасом перекрывали наши нужды. Ключевым было их низкий уровень пульсаций давления по сравнению с обычными шестеренками. Для сервоклапана пульсации — это помеха, они вносят шум в управляющий сигнал.
Сам силовой серводвигатель в этой схеме — это, по сути, гидроцилиндр с датчиком линейного перемещения (магнитострикционным) и датчиком давления в полостях. Сервоуправление шло по положению и по силе, с переключением между контурами. Самая сложная часть наладки — это момент переключения ?скорость/сила? при контакте ползуна с заготовкой. Нужно было погасить инерцию, избежать удара и начать выдержку под давлением. Тут пригодилась возможность тонкой настройки переходных процессов в сервоконтроллере. В итоге, удалось добиться плавности, которую не ожидали даже от пресса с электромеханическим приводом.
Ошибки и тупиковые ветви
Не все попытки были удачными. Пробовали как-то использовать в качестве силового привода для поворотного механизма не аксиально-плунжерный, а пластинчатый гидромотор из серии M4. Рассуждали так: у него меньше момент инерции ротора, значит, выше потенциальное быстродействие. Да и кривая момента на низких оборотах ровнее. Компания ВИКС как раз предлагает широкий спектр таких моторов, включая серии NHM. Но не учли главного — внутреннее проскальзывание (утечки) у пластинчатого мотора сильно зависит от давления и температуры масла.
В контуре позиционирования это вылилось в дрейф нуля. Мотор получал команду ?стоп?, золотник сервоклапана становился в нулевое положение, но из-за утечек внутри мотора под нагрузкой он все равно медленно проворачивался. Датчик положения это видел, контроллер давал корректирующий сигнал, система входила в низкочастотные колебания. С задачей удержания позиции под постоянной нагрузкой такой мотор справился, а вот для точного позиционирования с остановками — нет. Пришлось вернуться к плунжерным моторам.
Еще один тупик — попытка создать ?бюджетный? сервопривод на базе обычного гидромотора с частотным преобразователем и асинхронным электродвигателем. Идея была в том, чтобы управлять скоростью насоса, а значит, и расходом на мотор. Теоретически, это регулирование скорости вращения. Но динамика у такой системы никуда не годится. Инерция электродвигателя, насоса, плюс время отклика частотника — все это дает огромную задержку. О точном позиционировании не могло быть и речи. Система работала, но только для задач, где не нужны резкие изменения скорости или точная остановка. Для силового серводвигателя такой подход не годится категорически.
К чему все идет? Взгляд вперед
Сейчас тренд — это интеграция. Все хотят иметь компактный блок, где насос, сервоклапан, мотор и контроллер максимально объединены. Что-то вроде ?умного гидромотора? с встроенной электроникой. Это снижает длину гидролиний, а значит, и потери, и увеличивает жесткость системы, что положительно сказывается на быстродействии. Вижу, что некоторые производители компонентов, например, предлагающих пластинчатые насосы/моторы серий V или VQ, уже идут по пути улучшения КПД и снижения шумности, что косвенно готовит почву для их использования в более точных системах.
Другой вектор — это прямые сервоприводы (Direct Drive) на основе гидростатических машин. Когда сам насос является одновременно и управляющим элементом, и силовым. Это сложно и дорого, но потенциально дает максимальную динамику. Пока это больше лабораторные разработки.
В нашей же повседневной практике, выбирая компоненты для системы с силовым серводвигателем, мы по-прежнему смотрим на проверенные временем вещи: надежность плунжерных машин, качество сервоклапанов, скорость контроллера. И всегда закладываем 30% времени на пусконаладку и борьбу с неидеальностью реального мира — с температурой масла, с износом уплотнений, с вибрациями от соседнего оборудования. Теория — это одно, а заставить железо работать точно и безотказно в цеху — это совсем другая история. И именно в этой истории и кроется настоящее понимание того, что такое силовой сервопривод.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты-
 Сервопривод Delta
Сервопривод Delta -
 СЕРВОМОТОР С ПРЯМЫМ ПРИВОДОМ ABT
СЕРВОМОТОР С ПРЯМЫМ ПРИВОДОМ ABT -
 PHYSIS Сервомотор для поверхностного монтажа — ультратонкая серия
PHYSIS Сервомотор для поверхностного монтажа — ультратонкая серия -
 Коробка передач
Коробка передач -
 Лопастной насос T7-E для привода с регулируемой скоростью
Лопастной насос T7-E для привода с регулируемой скоростью -
 Шестеренчатый насос Sumitomo
Шестеренчатый насос Sumitomo -
 ВНУТРЕННИЙ ШЕСТЕРЕНЧАТЫЙ НАСОС VG – ОДНОНАСОСНЫЙ
ВНУТРЕННИЙ ШЕСТЕРЕНЧАТЫЙ НАСОС VG – ОДНОНАСОСНЫЙ -
 СЕРВОМОТОР ABT
СЕРВОМОТОР ABT -
 Сдвоенный насос VQ
Сдвоенный насос VQ -
 Одинарный насос T6GC, T7GB
Одинарный насос T6GC, T7GB -
 Одинарный насос T6C,T7B
Одинарный насос T6C,T7B -
 Сдвоенный насос T6GCC, T67GCB, T7GBB
Сдвоенный насос T6GCC, T67GCB, T7GBB
Связанный поиск
Связанный поиск- Напорный пластинчатый насос
- Вертикальная литьевая машина
- реверсивный гидравлический насос
- машина для литья алюминия под давлением
- Насос Parker T6c
- Скоростной шестеренный насос
- Гидравлическая машина для пластмасс
- китайский серводвигатель
- шестеренный масляный насос внутреннего зацепления
- машины для литья под низким давлением



