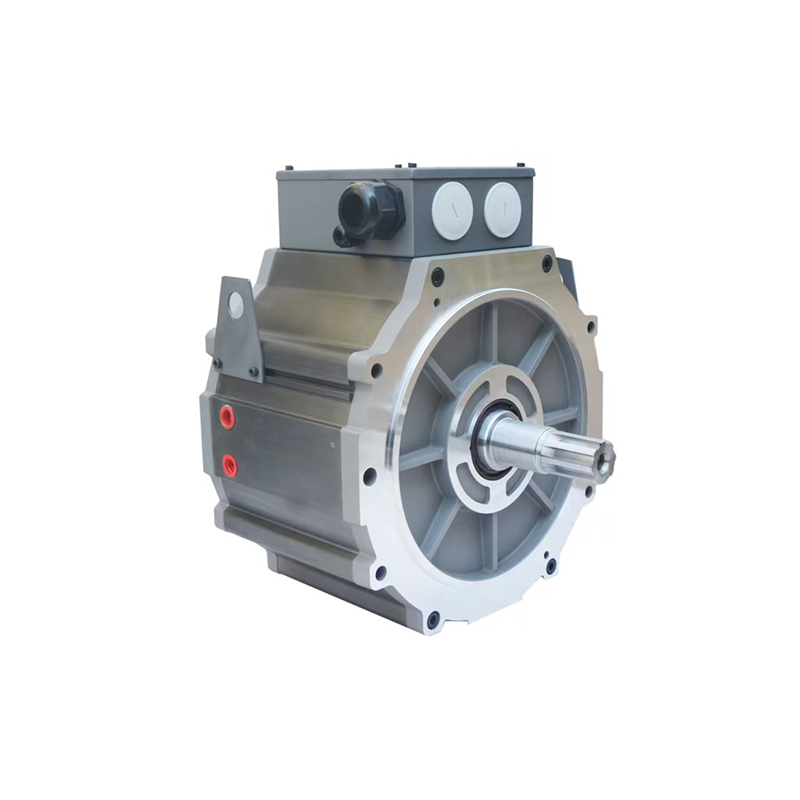
Синхронные серводвигатели
Когда говорят о синхронных серводвигателях, сразу всплывают темы точного позиционирования, динамики, обратной связи по энкодеру. Это, конечно, основа. Но в реальных проектах, особенно при интеграции в гидравлические системы или со сложными нагрузками, фокус смещается. Часто упускают из виду моментную перегрузочную способность в продолжительном режиме, тепловые режимы при работе с низкими скоростями и высоким крутящим моментом, а также — что критично — вопросы электромагнитной совместимости с частотными преобразователями и сетью. Многие думают, что выбрал двигатель с подходящими паспортными данными по мощности и скорости — и всё. А потом на объекте начинаются проблемы с нагревом, вибрациями на определённых скоростях, или, что хуже, сбои энкодера из-за наводок от силовых кабелей.
От теории к стенду: где начинаются нюансы
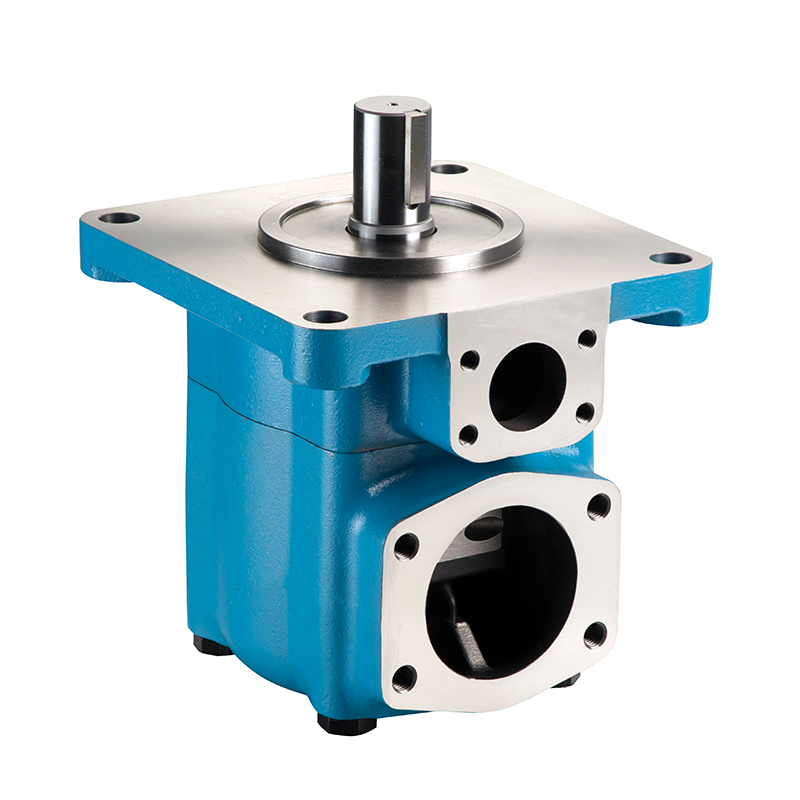
Взять, к примеру, задачу сопряжения синхронного серводвигателя с гидравлическим насосом, скажем, тем же шестерённым насосом высокого давления. Казалось бы, ставим двигатель, соединяем муфтой — и вперёд. Но здесь важен не просто момент на валу. Насосы серии VG, которые поставляет, например, ООО Викс Интеллектуальное Оборудование (Нинбо) (их сайт — https://www.vickshyd.ru — полезно полистать для понимания ассортимента), могут работать на давлениях до 40 МПа и скоростях до 4000 об/мин. Это создаёт переменную нагрузку на валу двигателя, зависящую от давления в системе. Если сервопривод настроен только на поддержание постоянной скорости, могут возникать рывки, перерегулирование. Нужно учитывать инерционность самой гидравлической системы, ёмкость гидролиний. Часто помогает не стандартный ПИД-регулятор скорости, а подключение внешнего датчика давления с feedforward сигналом на контур момента двигателя. Это уже тонкая настройка, которую в каталогах не найдёшь.
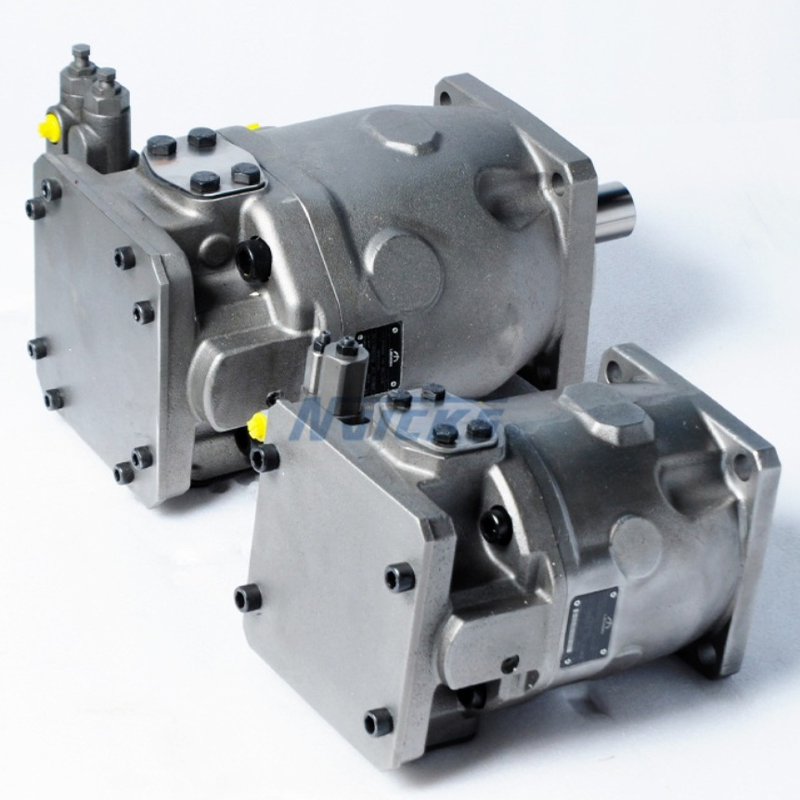
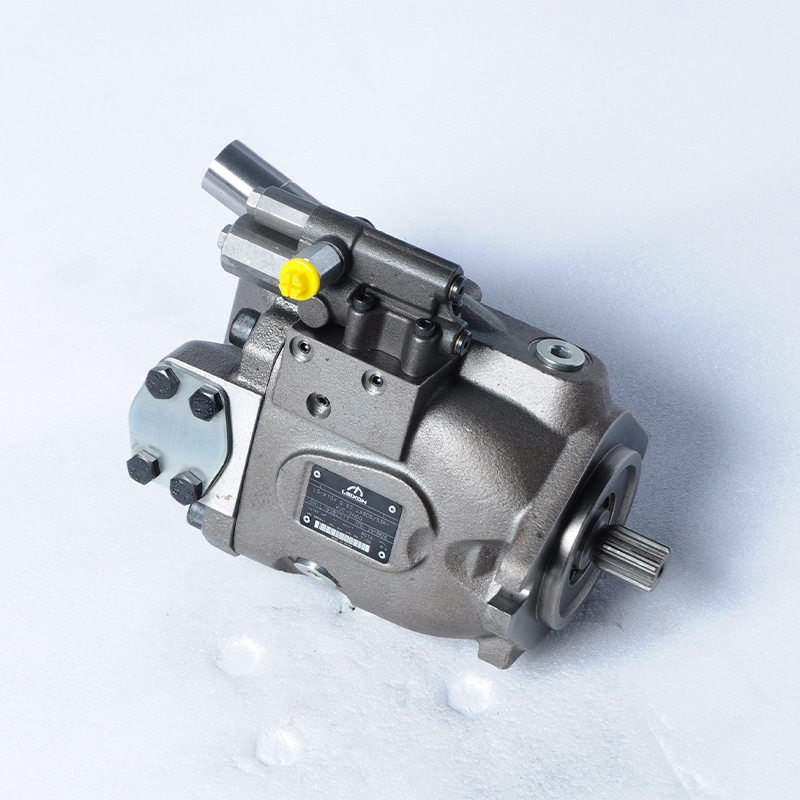
Был случай на испытательном стенде с насосом A10VSO. Двигатель подобран по пиковой мощности, вроде бы с запасом. Но при моделировании цикла работы с частыми пусками/остановами и резкими изменениями давления, двигатель начал перегреваться. Причина — не в среднем токе, а в том, что система охлаждения (самовентиляция) была рассчитана на номинальную скорость, а рабочий цикл требовал длительной работы на 10-15% от номинала, где обдув практически отсутствует. Пришлось ставить дополнительный внешний вентилятор. Мелочь? Но именно такие мелочи съедают время на пусконаладке.
Или другой аспект — выбор типа энкодера. Резольвер, синус-косинусный, абсолютный многооборотный... Для задач, где нужна просто точная скорость вращения насоса (как для тех же пластинчатых насосов серии V или T6), часто хватает и резольвера. Но если речь идёт о позиционировании, например, в гидравлическом прессе с точным контролем хода ползуна, где используется сервомотор, то без абсолютного энкодера не обойтись. И здесь важно проверить помехозащищённость линии связи энкодера. Однажды видел, как наводки от силового кабеля, проложенного в общем лотке с кабелем энкодера, вызывали периодические сбои в определении позиции. Решение — экранирование, раздельная прокладка, использование дифференциальных сигналов. Базовые вещи, но на них спотыкаются.
Интеграция в систему: моторы и насосы как единое целое
Когда рассматриваешь синхронные серводвигатели не как самостоятельный узел, а как часть привода, скажем, для гидромотора NHM или FMB, картина меняется. Здесь ключевым становится вопрос управления моментом и скоростью в замкнутом гидравлическом контуре. Особенно это актуально для инновационных ABT сервопластинчатых насосов, которые позиционируются как энергоэффективные. Их принцип работы подразумевает точное управление рабочим объёмом. И если этим управлением занимается сервопривод с электродвигателем, то отклик всей системы определяется не только быстродействием гидравлической части, но и динамикой самого электродвигателя.
В одном проекте с мотор-редуктором и системой точного дозирования пытались использовать стандартный асинхронный двигатель с частотником и датчиком обратной связи. Не вышло по точности и быстродействию. Перешли на синхронный серводвигатель с высокомоментным ротором. Точность вышла на уровень, но возникла новая проблема — резонансные частоты механической конструкции (двигатель-муфта-редуктор) попали в рабочий диапазон скоростей. Пришлось заказывать муфту с иными упругими характеристиками и активно использовать фильтры в настройке сервоусилителя для подавления этих частот. Это тот этап, где паспортные данные двигателя уже не помогают, нужен опыт или готовность к итерациям.
Компания ООО Викс Интеллектуальное Оборудование (Нинбо) в своём ассортименте представляет полный спектр гидравлических моторов, от NHM до EPMZ. Это наводит на мысль, что для каждого типа мотора может быть своя оптимальная стратегия управления от серводвигателя. Для высокомоментных низкоскоростных моторов (типа некоторых модификаций GHM) важна стабильность момента на низких оборотах без пульсаций. А для высокоскоростных (как некоторые модели FMC) — наоборот, способность сервопривода быстро отрабатывать задание по скорости. Универсального рецепта нет. Часто помогает анализ реальных нагрузочных диаграмм, а не расчёт по максимальным параметрам.
Питание и управление: скрытые сложности
Качество питающей сети — отдельная головная боль. Синхронный серводвигатель с современным сервоусилителем — это нелинейная нагрузка. Гармонические искажения, броски тока при рекуперативном торможении... Если в сети и так проблемы с качеством напряжения, могут срабатывать защиты или, что хуже, перегреваться трансформаторы. Видел ситуацию, где на объекте стояло несколько сервоприводов для управления группой плунжерных насосов A4VSO. При одновременном торможении нескольких осей рекуперативная энергия перегружала общий блок питания. Решение — установка рекуперативных модулей или резисторных тормозных блоков, правильно рассчитанных по пиковой мощности рассеивания.
Ещё один момент — выбор интерфейса управления. Fieldbus (EtherCAT, PROFINET) или аналоговые сигналы ±10В? Для сложных систем, где нужно синхронизировать, например, несколько осей (двигатель главного привода + двигатель насоса подпитки), Fieldbus практически обязателен. Но и здесь есть подводные камни: задержки в сети (jitter), которые могут влиять на точность синхронизации. При настройке EtherCAT для контура управления моментом серводвигателя, приводящего в действие насос, приходилось уменьшать cycle time до минимально возможного и тщательно проверять синхронизацию часов (DC). Без этого о высокой динамике можно забыть.
И нельзя забывать про кабели. Силовой кабель от усилителя к двигателю — это не просто три жилы. Это должен быть кабель с симметричной ёмкостью, хорошим экраном, рассчитанный на работу с ШИМ-напряжением высокой частоты. Дешёвые кабели приводят к повышенным потерям, нагреву, электромагнитным помехам и, в конечном счёте, к пробою изоляции. Рекомендую всегда использовать кабели, рекомендованные производителем сервоусилителя, даже если они дороже. Экономия на кабеле потом выливается в часах поиска неисправности и простое оборудования.
Из практики: кейсы и неочевидные выводы
Расскажу про один неудачный, но поучительный опыт. Задача — создать привод для испытания гидравлических клапанов. Нужно было точно воспроизводить скоростной профиль на валу, к которому присоединён насос, создающий давление. Выбрали мощный синхронный серводвигатель с казалось бы огромным запасом по моменту. Система собрана, начинаем тесты. И на определённых частотах (около 600-800 Гц по току статора) — жуткая вибрация, шум. Двигатель вроде бы исправен. Оказалось, проблема в механическом резонансе корпуса самого двигателя, возбуждаемом гармониками ШИМ-сигнала от усилителя. Производитель двигателя подтвердил, что для данной модели есть нерекомендуемый частотный диапазон. Пришлось программно ограничить скорость и пересмотреть профиль испытаний. Вывод: перед окончательным выбором двигателя полезно запросить у производителя графики механических резонансных частот ротора и статора.
Другой кейс связан с тепловым расчётом. Двигатель для привода шестерённого насоса VG с рабочим объёмом 100 мл/об был установлен в закрытый шкаф с плохой вентиляцией. По паспорту, ток и момент были в норме. Но через пару часов работы срабатывала тепловая защита. Термографическая съёмка показала, что перегревается не только двигатель, но и силовой кабель, и клеммная колодка. Проблема была в суммарном тепловыделении всех компонентов в замкнутом пространстве. Установили вытяжной вентилятор и приточные жалюзи — проблема исчезла. Теперь всегда прикидываю тепловыделение всего шкафа в сборе.
Работа с поставщиками компонентов, такими как ООО Викс Интеллектуальное Оборудование (Нинбо), полезна не только для заказа запчастей. Их технические специалисты часто сталкиваются с похожими задачами интеграции гидравлики и электропривода. Обсуждение с ними конкретного применения, например, серводвигателя с их пластинчатым мотором серии 35M, может натолкнуть на готовые, уже опробованные решения по монтажу или управлению, которые сэкономят массу времени. Их сайт https://www.vickshyd.ru служит хорошей отправной точкой для понимания возможностей гидравлической части системы, что критично для правильного выбора и настройки электрического привода.
Вместо заключения: о чём стоит подумать заранее
Итак, если резюмировать этот поток мыслей... Выбор и применение синхронных серводвигателей — это всегда компромисс и учёт множества факторов за рамками datasheet. Это и механика (резонансы, моменты инерции, муфты), и тепловые режимы, и качество электропитания, и тонкости настройки контуров управления. Особенно в связке с гидравликой, где инерционность среды добавляет свою динамику.
Стоит всегда запрашивать у производителя двигателя не только основные каталоги, но и документы вроде 'Рекомендации по монтажу и применению' или 'Технические примечания'. Там часто содержится та самая практическая информация, которая предотвращает ошибки. И обязательно проводить, если есть возможность, испытания в режимах, максимально приближенных к реальным, а не только в номинале.
Главное — не бояться, что система не заработает идеально с первого раза. Настройка сервопривода, особенно в нестандартных применениях, — это процесс. Понимание физики процессов как в самом двигателе, так и в приводимом механизме (будь то насос VG, мотор FMB или сложный гидроагрегат на базе A4VSO) — это то, что отличает просто монтажника от инженера. И именно это понимание в итоге позволяет получить от синхронного серводвигателя ту надёжность, точность и динамику, которые заложены в него конструкторами. Без лишней мистификации, с учётом всех описанных земных проблем.
Соответствующая продукция
Соответствующая продукция